






|
KiCad 8.0KiCad
|
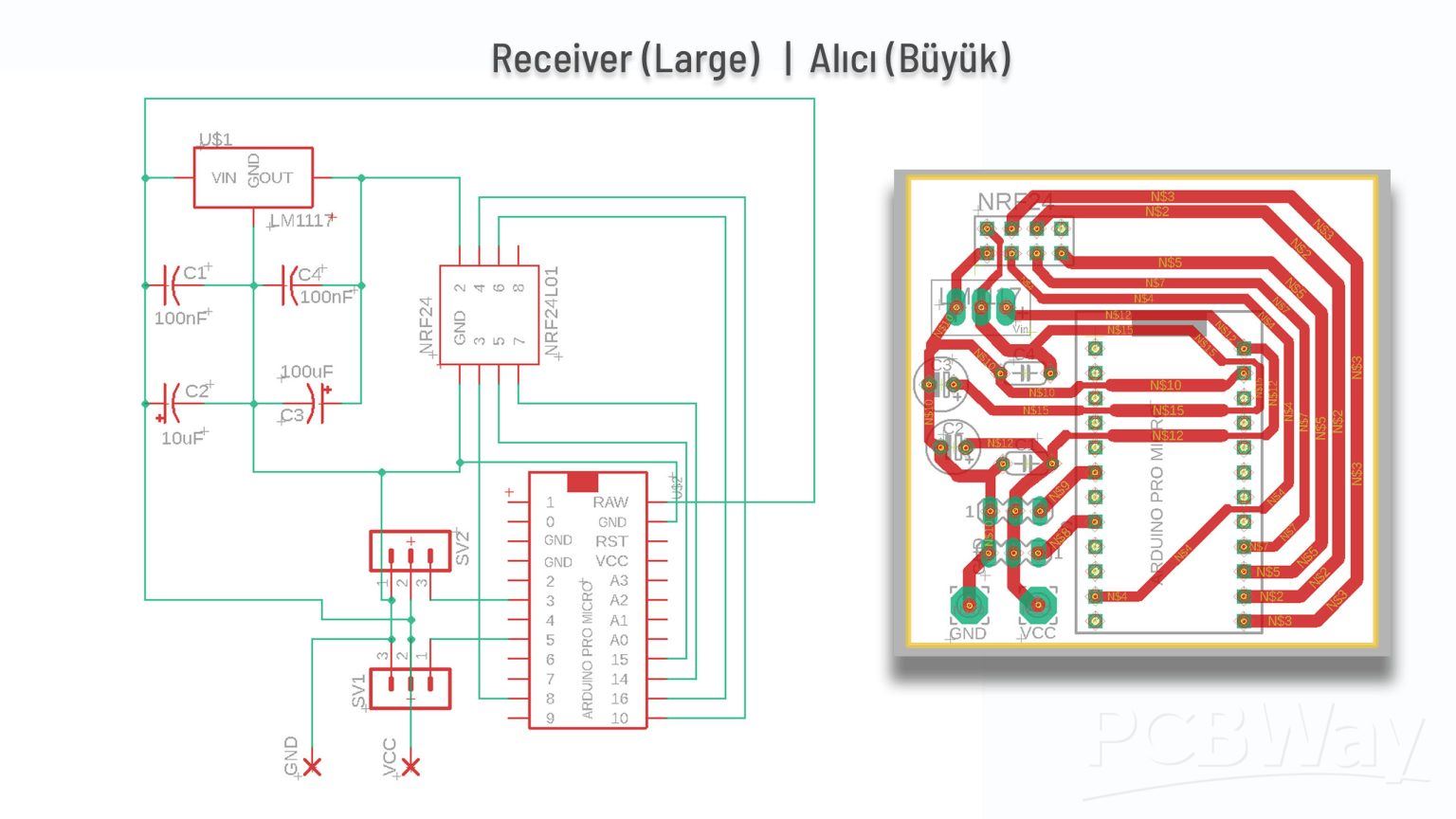
FPV Head Tracking System – Receiver PCB (Large Version)
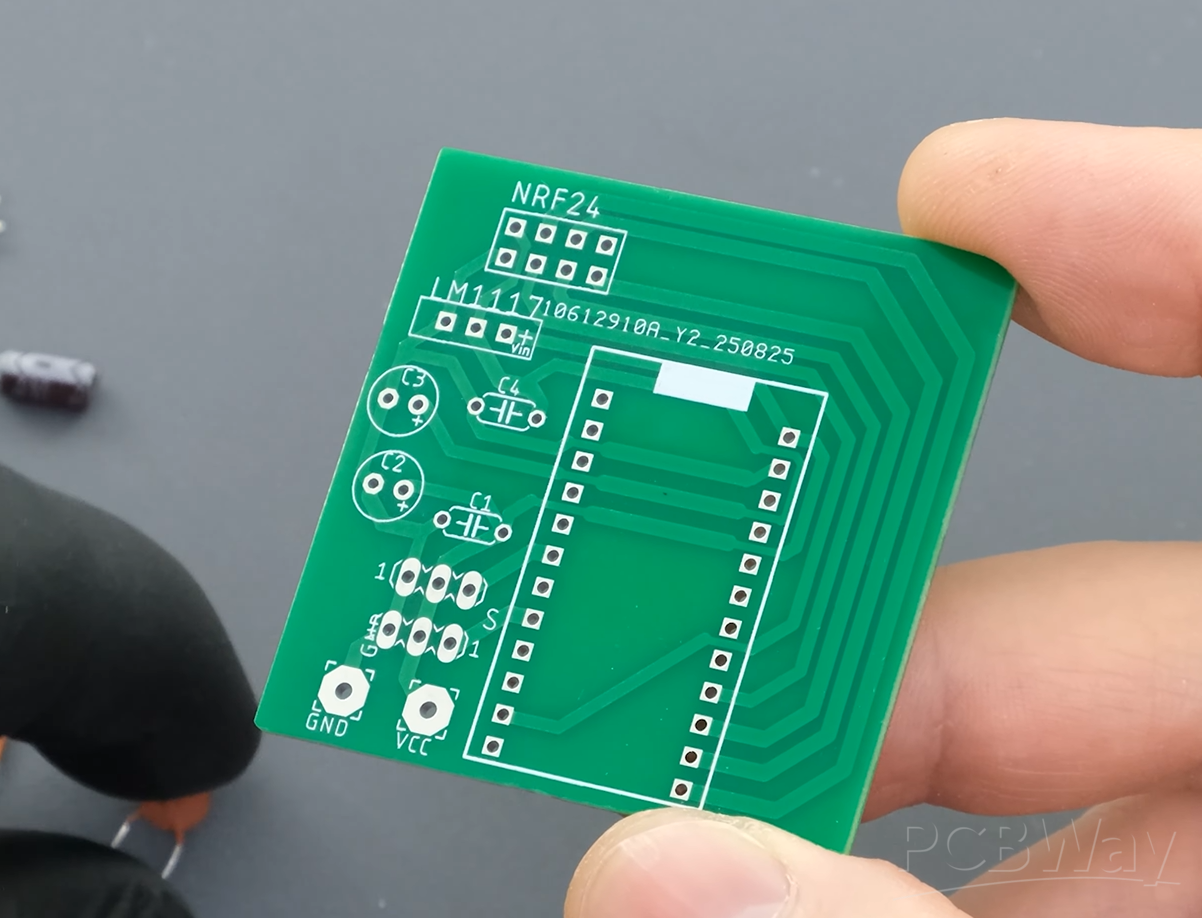
This Large Receiver PCB is a core part of a DIY FPV head tracking system, designed to receive head movement data wirelessly and convert it into precise servo motion for FPV camera pan and tilt control. The board prioritizes signal stability, long-range performance, and easy assembly, making it ideal for testing, prototyping, and reliable field use.
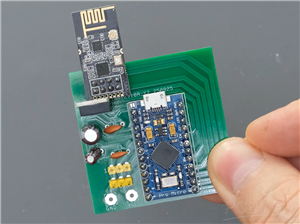
The receiver is built around an Arduino Pro Micro, which processes incoming orientation data received via an NRF24 RF module. For extended range applications, the design supports high-power NRF24 modules such as the E01-2G4M27D, capable of up to 500 mW RF output. With proper power regulation and a suitable antenna, this receiver is intended for long-range FPV setups.
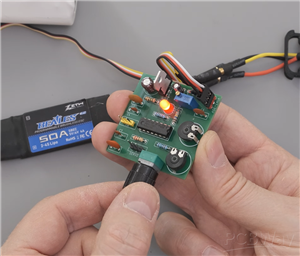
The PCB provides standard RC servo outputs for two axes:
- Pan (left–right)
- Tilt (up–down)
These outputs directly drive micro servos used in the head-tracking mechanism. While basic micro servos are sufficient for functionality, higher-quality servos can be used to achieve smoother and more precise camera motion.
As a large-format PCB, this version features:
- Wider trace spacing and clear routing
- Easier soldering and debugging
- Better accessibility to connectors and test points
This makes it especially suitable for users who prefer a robust, easy-to-work-with board during development or for permanent installations where space is not a strict limitation. Power stability is a key design focus. The receiver includes proper decoupling and regulation to ensure clean power delivery to the RF module, which is critical for maintaining long communication range and preventing signal dropouts.
Overall, the Large Receiver PCB offers a dependable and easy-to-assemble solution for FPV head tracking systems, delivering long-range wireless performance, stable servo control, and a layout optimized for reliability and ease of use.
Credit & Acknowledgement
Complete Design & Engineering Credit: RC Maker Lab (This project is shared for educational and community reference purposes)
// FPV HEAD TRACKING RECEIVER CODE | ALICI KODU
// BY KendinYap
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
// Servo tanımlamaları
Servo yawServo;
Servo pitchServo;
// NRF24L01 tanımlamaları
RF24 radio(8, 10); // CE: D8, CSN: D10
const byte address[6] = "00001"; // Verici ile aynı adres
// Veri yapısı (verici ile aynı olmalı)
struct Data_Package {
byte pitch;
byte yaw;
bool calibrationDone; // Kalibrasyon tamamlandı bilgisi
};
Data_Package data;
// Son sinyal alma zamanı
unsigned long lastSignalTime = 0;
const unsigned long signalTimeout = 1000; // 1 saniye sinyal kaybolma süresi
void setup() {
Serial.begin(115200);
// Servo pinleri ayarla
yawServo.attach(5); // Yaw servo, D5 pinine bağlı
pitchServo.attach(3); // Pitch servo, D3 pinine bağlı
// Servoları başlangıçta merkez konumuna getir
yawServo.write(90);
pitchServo.write(90);
// NRF24L01 başlatma
radio.begin();
radio.openReadingPipe(1, address);
radio.setChannel(120);
radio.setAutoAck(false);
radio.setDataRate(RF24_250KBPS);
radio.setPALevel(RF24_PA_MAX);
radio.startListening();
Serial.println("Alıcı hazır!");
}
void loop() {
// Veri alındı mı?
if (radio.available()) {
radio.read(&data, sizeof(Data_Package));
lastSignalTime = millis(); // Son sinyal alma zamanını güncelle
// Normal veri işleme
int yawAngle = map(data.yaw, 0, 255, 0, 180); // 0-255 aralığını 0-180 dereceye dönüştür
int pitchAngle = map(data.pitch, 0, 255, 0, 180); // 0-255 aralığını 0-180 dereceye dönüştür
// Servolara açı değerlerini gönder
yawServo.write(yawAngle);
pitchServo.write(pitchAngle);
// Seri monitörde değerleri yazdır
Serial.print("Yaw: ");
Serial.print(yawAngle);
Serial.print(" Pitch: ");
Serial.println(pitchAngle);
}
// Sinyal kaybolursa servoları merkeze getir
if (millis() - lastSignalTime > signalTimeout) {
yawServo.write(90);
pitchServo.write(90);
Serial.println("Sinyal kayboldu! Servolar merkeze döndü.");
}
}
FPV Head Tracking System – Receiver PCB (Large Version)
Project images are for reference only. Actual production is based on the manufacturing files on the project page.
Please review the designer's notes (e.g., PCB thickness) and select the appropriate options.
PCBWay is not responsible
for issues caused by unsuitable parameter selections.
For more important ordering information, please refer to
Read More


















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW


- Comments(0)
- Likes(1)
More by Nirmal Maa
-
 VC-02 Module Based Home Automation
In this guide, I’ll take you through the process of building a project using a custom-designed PCB, ...
VC-02 Module Based Home Automation
In this guide, I’ll take you through the process of building a project using a custom-designed PCB, ...
-
 PCBWay 12th Anniversary Badge Design
To celebrate the 12th Anniversary of PCBWay, I designed a special interactive electronic badge that ...
PCBWay 12th Anniversary Badge Design
To celebrate the 12th Anniversary of PCBWay, I designed a special interactive electronic badge that ...
-
 16-Array Line Follower Robot Sensor PCB Design
This project presents a purpose-built 16-channel line follower sensor PCB engineered for precision r...
16-Array Line Follower Robot Sensor PCB Design
This project presents a purpose-built 16-channel line follower sensor PCB engineered for precision r...
-
 ESP01 + TM1637 NTP Clock (0.56″ 7-Segment Display)
This project is a minimalist Wi-Fi desk clock built around the ESP-01 / ESP-01S and a 0.56″ TM1637 7...
ESP01 + TM1637 NTP Clock (0.56″ 7-Segment Display)
This project is a minimalist Wi-Fi desk clock built around the ESP-01 / ESP-01S and a 0.56″ TM1637 7...
-
 Wireless Dual-Joystick NRF24 Controller PCB for Robotics & RC Applications
This project presents a compact and reliable dual-joystick wireless controller PCB, designed for rob...
Wireless Dual-Joystick NRF24 Controller PCB for Robotics & RC Applications
This project presents a compact and reliable dual-joystick wireless controller PCB, designed for rob...
-
 Channel RC Receiver PCB (NRF24 + Arduino Nano)
This receiver board is the compact, reliable counterpart to the 6-channel transmitter, designed to d...
Channel RC Receiver PCB (NRF24 + Arduino Nano)
This receiver board is the compact, reliable counterpart to the 6-channel transmitter, designed to d...
-
 Compact 3×3 Streaming Macro Pad with RGB & Encoders
The TriPad Studio Controller is a professional-grade 3×3 macro pad designed specifically for streame...
Compact 3×3 Streaming Macro Pad with RGB & Encoders
The TriPad Studio Controller is a professional-grade 3×3 macro pad designed specifically for streame...
-
 Servo & ESC Tester with End-Point Adjustment – (Dual Supply / High-Power)
The Servo & ESC Tester PCB (Dual Supply Version) is designed for applications involving high-tor...
Servo & ESC Tester with End-Point Adjustment – (Dual Supply / High-Power)
The Servo & ESC Tester PCB (Dual Supply Version) is designed for applications involving high-tor...
-
 Servo & ESC Tester with End-Point Adjustment – Single Supply
This Servo & ESC Tester PCB (Single Supply Version) is designed as a compact and reliable tool f...
Servo & ESC Tester with End-Point Adjustment – Single Supply
This Servo & ESC Tester PCB (Single Supply Version) is designed as a compact and reliable tool f...
-
 FPV Head Tracking System – Transmitter PCB
The Transmitter PCB is the sensing and data-sending side of the FPV head tracking system, designed t...
FPV Head Tracking System – Transmitter PCB
The Transmitter PCB is the sensing and data-sending side of the FPV head tracking system, designed t...
-
 FPV Head Tracking System – Receiver PCB (Small Version)
The Small Receiver PCB is the compact counterpart of the FPV head tracking system receiver, designed...
FPV Head Tracking System – Receiver PCB (Small Version)
The Small Receiver PCB is the compact counterpart of the FPV head tracking system receiver, designed...
-
 FPV Head Tracking System – Receiver PCB (Large Version)
This Large Receiver PCB is a core part of a DIY FPV head tracking system, designed to receive head m...
FPV Head Tracking System – Receiver PCB (Large Version)
This Large Receiver PCB is a core part of a DIY FPV head tracking system, designed to receive head m...
-
 N20 Motor Breakout with DRV8212 4A Driver
This N20 Motor Breakout is a compact, motor-mounted driver board built around the DRV8212 H-bridge m...
N20 Motor Breakout with DRV8212 4A Driver
This N20 Motor Breakout is a compact, motor-mounted driver board built around the DRV8212 H-bridge m...
-
 Compact Motion Controller for Competitive Robotics
HMotion is a purpose-built controller PCB designed to simplify and strengthen robotics projects wher...
Compact Motion Controller for Competitive Robotics
HMotion is a purpose-built controller PCB designed to simplify and strengthen robotics projects wher...
-
 LM723 Solar Charge Controller with Voltage & Current Control
This project demonstrates a high-power solar charge controller built around the classic LM723 voltag...
LM723 Solar Charge Controller with Voltage & Current Control
This project demonstrates a high-power solar charge controller built around the classic LM723 voltag...
-
 Transformerless Adjustable AC-to-DC LED Driver (220V AC → 3V–110V DC)
This project explores a transformerless, auto-adjustable LED driver designed to convert 220V AC main...
Transformerless Adjustable AC-to-DC LED Driver (220V AC → 3V–110V DC)
This project explores a transformerless, auto-adjustable LED driver designed to convert 220V AC main...
-
 Adjustable 3.7V Step-Up Boost Converter (5V–30V)
This project presents a compact and efficient step-up boost converter designed to generate higher vo...
Adjustable 3.7V Step-Up Boost Converter (5V–30V)
This project presents a compact and efficient step-up boost converter designed to generate higher vo...
-
 60A Brushless BLDC Motor Controller (ESC)
This project showcases a DIY 60A Brushless DC (BLDC) Motor Controller (ESC) built using N-channel MO...
60A Brushless BLDC Motor Controller (ESC)
This project showcases a DIY 60A Brushless DC (BLDC) Motor Controller (ESC) built using N-channel MO...
-
Programmable Mist Maker - XIAO / QT PY Extension
1036 2 1 -
RadioHAT - Raspberry Pi radio development platform
840 0 2 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3296 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3913 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4292 2 2





















