






|
|
Raspberry pi |
x 1 | |
|
|
Solar Pannels |
x 1 | |
|
|
Wheels |
x 1 | |
|
|
12V Battery |
x 1 | |
|
|
Spectral Camera |
x 1 | |
|
|
Motors |
x 6 | |
|
|
Motor Drivers |
x 1 |

|
fusion360 |
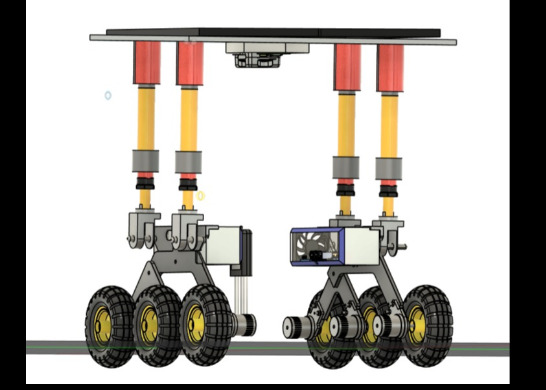
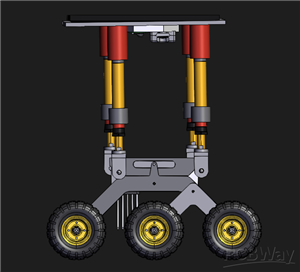
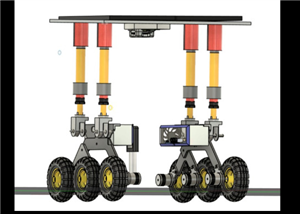
Vision Bot V1 – AI rover with pneumatic
Vision Bot V1 is the latest and fully refined iteration of our agricultural monitoring rover, developed as part of an intelligent dual-robot farming system. It represents a significant evolution from the initial concept model, addressing real-world agricultural constraints and operational feasibility.
The earlier Vision Bot V0 served as a conceptual foundation—a fixed-height, non-adjustable design intended primarily for visualization, workflow validation, and early feasibility studies. While V0 successfully demonstrated the idea of AI-based crop health monitoring, it was not field-proven, lacked adaptability, and was limited to fixed-height crops. These constraints made it unsuitable for diverse crop environments and real deployment.
Vision Bot V1 resolves these limitations with a pneumatics-based height adjustment mechanism, allowing the sensing module to dynamically adapt to different crop heights and growth stages. This upgrade enables consistent imaging angles, stable sensor readings, and accurate detection across multiple crop types.
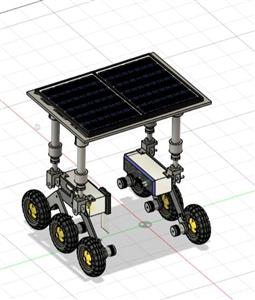
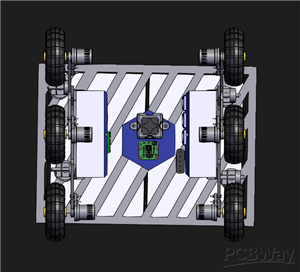
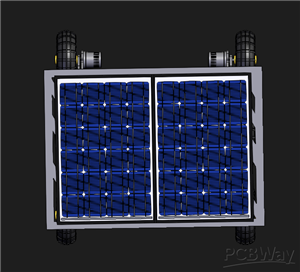
The rover is solar-powered, enabling long-duration autonomous patrols in large farmlands without dependency on frequent charging. It integrates AI-driven vision processing, spectral sensing, and thermal analysis to detect plant infections at an early stage. Detected infection data is transmitted in real time to the treatment unit (Spray Bot), ensuring targeted pesticide application only where required.
Vision Bot V1 is designed as a deployable, modular, and scalable platform, emphasizing stability, adaptability, and precision. The mechanical structure, sensor placement, and mobility system are optimized for agricultural terrain, making it suitable for real-world pilot deployment rather than conceptual demonstration.
In summary, Vision Bot V1 transforms an unadjustable, non-validated concept into a practical, field-oriented agricultural robot, capable of supporting intelligent, data-driven, and sustainable farming practices.
Vision Bot V1 – AI rover with pneumatic
















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW



- Comments(6)
- Likes(2)
More by MAATHES THILAK K
-
 BLUDIONO - Arduino Accelerated with Bluetooth Module
This project presents a compact Arduino-compatible SMD development board based on the ATmega328P-AU,...
BLUDIONO - Arduino Accelerated with Bluetooth Module
This project presents a compact Arduino-compatible SMD development board based on the ATmega328P-AU,...
-
 Solder-Master-PRO
is a precision soldering station designed to deliver professional-grade temperature control using a ...
Solder-Master-PRO
is a precision soldering station designed to deliver professional-grade temperature control using a ...
-
 RP2040 Community-Driven UNO MCU
This project expands an RP2040-based, Arduino UNO–style microcontroller designed to stay familiar wh...
RP2040 Community-Driven UNO MCU
This project expands an RP2040-based, Arduino UNO–style microcontroller designed to stay familiar wh...
-
 4CH_TIMER_RELAY
This 4-channel relay timer controller is built around the ESP32-C3 microcontroller, offering smart a...
4CH_TIMER_RELAY
This 4-channel relay timer controller is built around the ESP32-C3 microcontroller, offering smart a...
-
 Spray Bot - 3D MODEL
Spray Bot is an intelligent agricultural robot designed to complement Vision Bot by performing targe...
Spray Bot - 3D MODEL
Spray Bot is an intelligent agricultural robot designed to complement Vision Bot by performing targe...
-
 AIR MOUSE CASE
_ is a compact wireless remote mouse built around the ESP32-C3, intended for smart TVs, media center...
AIR MOUSE CASE
_ is a compact wireless remote mouse built around the ESP32-C3, intended for smart TVs, media center...
-
 RS485 based Flight Controller - STM32F411CEU6
This repository documents the design and implementation of a custom STM32F411-based flight controlle...
RS485 based Flight Controller - STM32F411CEU6
This repository documents the design and implementation of a custom STM32F411-based flight controlle...
-
 SBUS-Transmitter Made with ESP32
This centroid file is an approximate pick-and-place reference created for early PCB planning of your...
SBUS-Transmitter Made with ESP32
This centroid file is an approximate pick-and-place reference created for early PCB planning of your...
-
 Attiny85-Powered Mini Oscilloscope
This project presents a compact, cost-effective mini oscilloscope PCB powered by the ATtiny85 microc...
Attiny85-Powered Mini Oscilloscope
This project presents a compact, cost-effective mini oscilloscope PCB powered by the ATtiny85 microc...
-
 Water Motor Controller - Twin Node
Project DescriptionThe TWIN-NODE Motor Controller is a compact, wireless motor control PCB designed ...
Water Motor Controller - Twin Node
Project DescriptionThe TWIN-NODE Motor Controller is a compact, wireless motor control PCB designed ...
-
 BENCH_POWER_SUPPLY-PSU
This project presents a compact bench power supply enclosure designed in Autodesk Fusion 360, tailor...
BENCH_POWER_SUPPLY-PSU
This project presents a compact bench power supply enclosure designed in Autodesk Fusion 360, tailor...
-
 AIR_MOUSE – ESP32-C3 Based Wireless Air-Style Remote
The AIR_MOUSE is a compact wireless air-style remote designed for effortless navigation of TVs and o...
AIR_MOUSE – ESP32-C3 Based Wireless Air-Style Remote
The AIR_MOUSE is a compact wireless air-style remote designed for effortless navigation of TVs and o...
-
 Indoor Node - WaterlevelMonitor - Twin Node
The TWIN-NODE Indoor Node is a battery-powered receiver module designed to provide local indication ...
Indoor Node - WaterlevelMonitor - Twin Node
The TWIN-NODE Indoor Node is a battery-powered receiver module designed to provide local indication ...
-
 Twin_Node_V2.0_WaterLevelMonitor
TWIN-NODE is a two-node, ultra-low-power water level monitoring system engineered for overhead tanks...
Twin_Node_V2.0_WaterLevelMonitor
TWIN-NODE is a two-node, ultra-low-power water level monitoring system engineered for overhead tanks...
-
 Twin_Node_V1.0-OUTDOOR
TWIN NODE V1.0 is a low-power, outdoor-ready water level sensor node designed as a practical learnin...
Twin_Node_V1.0-OUTDOOR
TWIN NODE V1.0 is a low-power, outdoor-ready water level sensor node designed as a practical learnin...
-
 Vision Bot V1 – AI rover with pneumatic
Vision Bot V1 is the latest and fully refined iteration of our agricultural monitoring rover, develo...
Vision Bot V1 – AI rover with pneumatic
Vision Bot V1 is the latest and fully refined iteration of our agricultural monitoring rover, develo...
-
 OverEngineered Bread Board Power supply
Over-Engineered Breadboard Power SupplyThis project is a compact, high-current breadboard power supp...
OverEngineered Bread Board Power supply
Over-Engineered Breadboard Power SupplyThis project is a compact, high-current breadboard power supp...
-
 USB to UART Converter Board using CP2102
This project presents a simple and compact USB to UART converter board designed around the CP2102 US...
USB to UART Converter Board using CP2102
This project presents a simple and compact USB to UART converter board designed around the CP2102 US...
-
Programmable Mist Maker - XIAO / QT PY Extension
994 2 1 -
RadioHAT - Raspberry Pi radio development platform
802 0 2 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3259 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3880 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4254 2 2





















