PCBWay Community
Search title or content
Search
PCBWay
PCB Instant Quote
CNC | 3D Printing
Login
Sign Up
More Notifications
No notifications.
My Profile
My projects
My Likes
My Deals
My Goods for Bazaar
Settings
Sign Out
Projects
Categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
View all categories
By Source Files
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Tad Boy Color
SummerCart64 - a fully open source N64 flashcart
kv4p HT v1.7b
QuinLED-Dig-Uno
Bike Fingerprint - PCB
Arduino RC engine sound & light controller with inertia simulation for ESP32
Solar Powered WiFi Weather Station V2.0
Frog Boy Color
SIDKick pico 0.2 (SID 6581/8580-replacement for C64/C128)
View all source files projects
Featured Projects
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Featured
Source Files
Video
View all projects
Questions
Sponsorships
Feedback
Blog
Store
PCB Design
Contest
- 2026 KiCad PCB Design Contest
- 8th Project Design Contest
- 7th Project Design Contest
- KiCad Design Contest
- 6th Project Design Contest
- 5th PCB Design Contest
- 4th PCB Design Contest
- Raspberry Pi Pico Contest
- PCB Design Tutorial
- 3rd PCB Design Contest
- I CAN SOLDER Kit Contest
- 2nd PCB Design Contest
- 1st PCB Design Contest
Add questions
Create a project
Please verify your email address so that you can enjoy our more comprehensive services.
Wearables
Weather
All categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
3D Printing
Blinkenlights
Calculator
Camera
Clocks
CNC
Educational
Automotive
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Keyboards
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Raspberry Pi
Radio
Retro Stuffs
Space & Satellite
Sensors
Software
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
Project by top creative fields
All categories
3D Printing
Arduino
Audio
Automotive
Blinkenlights
Breakout Board Projects
Calculator
Camera
Clocks
CNC
Computers & USB
DIY Electronics
Educational
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Hardware
Home Automation
IoT
Keyboards
LED Displays & Matrices
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Radio
Raspberry Pi
Retro Stuffs
Robotics
Sensors
Software
Space & Satellite
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
View all categories
Share & Discover
All tags
Audio
Arduino
3D printing
Board
LED
Calculator
Create a project
Sort by : Trending
Trending
Score
Likes
Views
Discuss
Newest
Featured
Source Files
3D Design
Video
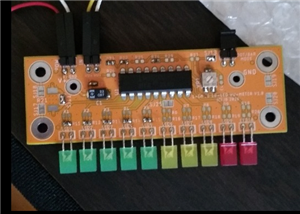
The 1-CH JB 10-LED VU-METER V1.0 is a modular, ultra-low-profile 1-channel audio level indicator based on the classic LM3915/16 drivers. It is specifically optimized and bench-tested using the LM3916 ...
1-CH JB 10-LED VU-METER V1.0 --- 1-Channel 10-LED VU Meter Driver Module
124
0
0
jabu74
jabu74
POLAND
0
1
PCB design I've made for the DrawBridge Plus! project by Robert Smith. Based on DrawBridge Plus! schematic.Visit author's page for more information about the project: http://amiga.robsmithdev.co.uk/3D...
DrawBridge - Amiga Floppy Disk Reader/Writer for PC
12879
17
43
Damian rime / Fancy Rats
Damian rime / Fancy Rats
POLAND
90
1
### DESCRIPTIONPCB is a part of my robot which purpose is to solve SLAM algorithm problem. Hussar_redSLAM is a high performance mobile robot with a huge amount of sensors control by microcontroller ST...
HUSSAR - mobile robot for SLAM algorithm (high performance)
3046
0
6
hussarPL
hussarPL
POLAND
2
0
The eprom programming adapter will support 27C322 (4Mx8-bit), 27C160 (2Mx8-bit), 27C800 (1Mx8-bit) 27C400 (512kx8-bit).Converts the mask- EP- EEP- ROM pinouts of the above parts to the JEDEC pinout of...
TL866 27c400/800/160 Adapter
5582
1
16
Roman Kubat
Roman Kubat
POLAND
133
19
1x DIP switch 1x DPDT switch 1x BC327 transistor 1x 48-pin ZIF socket 5x 10k resistorThe eprom programming adapter will support 27C322 (4Mx8-bit), 27C160 (2Mx8-bit), 27C800 (1Mx8-b...
Adapter for TL866 Minipro EPROM Programmer 27C322 27C160 27C800 27C400
13002
4
36
Roman Kubat
Roman Kubat
POLAND
133
19
This is my personal version of the 6502 Computer designed by Ben Eater. I have added serial over USB (using R6551 and FT230XS chips) and ATtiny based PS/2 keyboard controller.Whole build can be made u...
65C02 Hobby Computer
13223
1
26
Dawid Buchwald
Dawid Buchwald
POLAND
37
3
STMBL is an open source servi drive designeto for Retrofitting CNC machines and Robots.Itsupports Industrial AC and DC servos with up to 320V and 2kw.Supported MotorsSynchronous AC ServosAsynchronous ...
stmbl servo motor drive
11628
3
10
Krzysztof Sroka
Krzysztof Sroka
POLAND
11
1
This is an exact copy of original retro machine - Sinclair ZX Spectrum 48. You can use parts from broken mainboard and bring them back to life ;) V6 Rev3
ZX Spectrum 48 Issue 3B Redrawn
20017
12
70
PABB
PABB
POLAND
46
0
Player AY-3-8910 with Arduino Mini Pro and OLED SSD1306 display.It plays PSG files from SD card and displays on OLED SSD1306 display.On the Internet we can find a collection of music files -> http:...
AY-3-8910 Player Arduino OLED
5820
5
7
Roman Kubat
Roman Kubat
POLAND
133
19
PCB design for [M]ouse project, a PS/2 to 1351 mouse adapter for Commodore 64. Simple design, THT components.Download firmware:Revised firmware by Alfred Eenkhoorn (improves mouse compatibility, recom...
PS/2 Mouse adapter for Commodore 64 (1351 mouse hardware emulation)
19713
40
56
Damian rime / Fancy Rats
Damian rime / Fancy Rats
POLAND
90
1
New GPSDO concept.No any PLL loops or frequiency regulations.Maximum stability and accurancy theoreticaly avalable.Everyting is made in GPS receiver itself.Theory:- GPS receiver have its internal 48 M...
GPSDO STM32G474 NEO-M8N
4557
4
3
Dima Batareykin
Dima Batareykin
POLAND
7
10
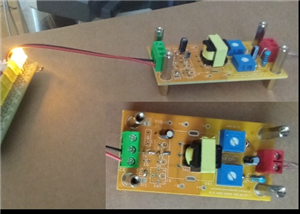
This project is a 1-Channel Isolated Speaker-Level Converter designed to step down the high-voltage output from a audio power amplifier to a proportionally lower, safe VAC or VDC voltage.The device co...
1-CH JB ISOL AUDIO CONV V1.0 --- 1-Channel Isolated Speaker-Level Converter Module
149
0
0
jabu74
jabu74
POLAND
0
1
A small NRF24L01 to Wifi gateway. This project is used to control the automatic roller blinds motor project. It runs a web server which serves a responsive web interface that allows you to control the...
Automatic roller blinds web interface
3587
0
7
Twinsen
Twinsen
POLAND
6
0
Automatic roller blinds motorAutomatic window roller blinds that can be controlled wirelessly using a NRF24L01 module. Controlled either by a small remote, web interface or RESTful API. Built around a...
Automatic roller blinds motor
4376
0
14
Twinsen
Twinsen
POLAND
6
0
This replacement board for Nokia 3310/3330 phones brings FM/FSK capabilities on 70cm amateur radio band (including 433MHz ISM). The board uses a G-NiceRF SA868S UHF RF module running OpenRTX firmware....
Mainboard replacement for Nokia 3310//3330
10067
0
7
Wojciech Kaczmarski
Wojciech Kaczmarski
POLAND
29
12
DIY LED Resin Sticker with Custom Electronics & 3D-Printed CaseYoutube video -----> https://youtu.be/6LOUOs8ukiUOrder Project PCBs:1st PCB2nd PCB3rd PCBDescription:This project includes files f...
DIY LED Resin Sticker with Custom Electronics & 3D-Printed Case
1558
2
2
Nick Electronics
Nick Electronics
POLAND
7
0
1
2
3
4
5
6
7
8
9
10
11
...