PCBWay Community
Search title or content
Search
PCBWay
PCB Instant Quote
CNC | 3D Printing
Login
Sign Up
More Notifications
No notifications.
My Profile
My projects
My Likes
My Deals
My Goods for Bazaar
Settings
Sign Out
Projects
Categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
View all categories
By Source Files
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Tad Boy Color
SummerCart64 - a fully open source N64 flashcart
kv4p HT v1.7b
QuinLED-Dig-Uno
Bike Fingerprint - PCB
Arduino RC engine sound & light controller with inertia simulation for ESP32
Solar Powered WiFi Weather Station V2.0
SIDKick pico 0.2 (SID 6581/8580-replacement for C64/C128)
Frog Boy Color
View all source files projects
Featured Projects
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Featured
Source Files
Video
View all projects
Questions
Sponsorships
Feedback
Blog
Store
PCB Design
Contest
- 2026 KiCad PCB Design Contest
- 8th Project Design Contest
- 7th Project Design Contest
- KiCad Design Contest
- 6th Project Design Contest
- 5th PCB Design Contest
- 4th PCB Design Contest
- Raspberry Pi Pico Contest
- PCB Design Tutorial
- 3rd PCB Design Contest
- I CAN SOLDER Kit Contest
- 2nd PCB Design Contest
- 1st PCB Design Contest
Add questions
Create a project
Please verify your email address so that you can enjoy our more comprehensive services.
Wearables
Weather
All categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
3D Printing
Blinkenlights
Calculator
Camera
Clocks
CNC
Educational
Automotive
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Keyboards
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Raspberry Pi
Radio
Retro Stuffs
Space & Satellite
Sensors
Software
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
Project by top creative fields
All categories
3D Printing
Arduino
Audio
Automotive
Blinkenlights
Breakout Board Projects
Calculator
Camera
Clocks
CNC
Computers & USB
DIY Electronics
Educational
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Hardware
Home Automation
IoT
Keyboards
LED Displays & Matrices
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Radio
Raspberry Pi
Retro Stuffs
Robotics
Sensors
Software
Space & Satellite
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
View all categories
Virtual Reality
From virtual reality headsets or multi-projected environments, let’s be the “Ready Player One”.
All tags
Virtual reality
Commodore 64
Sensor
Engine
Turbo
Create a project
Sort by : Trending
Trending
Score
Likes
Views
Discuss
Newest
Featured
Source Files
3D Design
Video
1 IntroductionsThe project aims to develop an active-based azimuth-altitude dual axis solar tracker using Arduino UNO and Python .This is also part of my diploma final year project when I study in Sou...
Robotic - Bluetooth - Azimuth Altitude Dual Axis Solar Tracker PCB
3878
3
4
Engineer
Engineer
MALAYSIA
1
0
Case for the Arducam OV9281. This can be used as an AI sensor that can track fullbody.
BackV3-share
29
0
0
Engineer
Engineer
UNITED STATES OF AMERICA
0
0
UPDATE: THE v1 IS NOW SUPERSEEDED BY THE v2, VIEW IT HERE!https://www.pcbway.com/project/shareproject/The_PsuedoPancakes_v2_WE_MUST_GO_HIGHER_6503651f.html-- PLEASE KEEP IN MIND, THE LICENSE WILL BE A...
The PsuedoPancakes: A Low Cost, Open Source Alternative To Fresnel and Pancake Lens for $20
6077
4
9
Walker Dev
Walker Dev
UNITED STATES OF AMERICA
2
0
### DESCRIPTIONA photodiode for detecting pulses from the HTC Vive Base Station.### TECHNICAL DETAILS / COMPONENTSLink to Mouser Cart for ONE 16x16 board.https://www2.mouser.com/ProjectManager/Project...
Roboy Darkroom: Vive Tracker Photodiodes 4x4
4250
0
3
Nora Kazour
Nora Kazour
UNITED STATES OF AMERICA
3
0
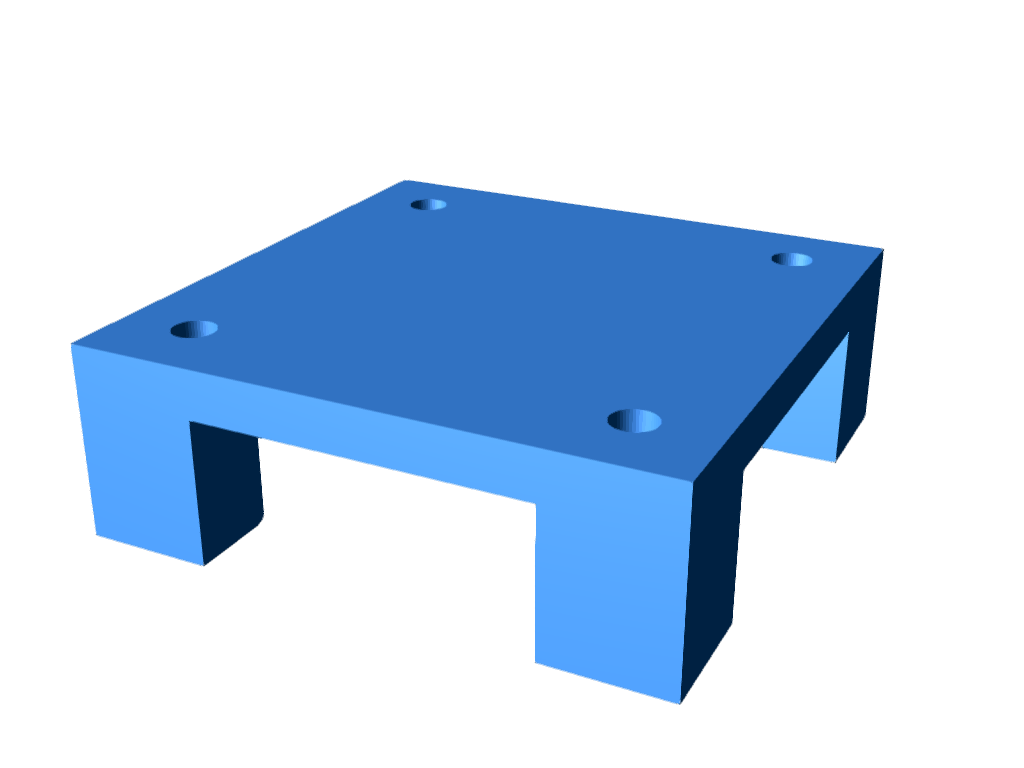
This is a wall-mounted holder for holding up Oculus Quest 1/2/3 headsets. The design is inspired by a cat and firmly holds the headsets and the controllers in position.Be aware that for Quest 3 there ...
Wall mount holder for oculus quest1/2/3
1554
0
1
Zifan Li
Zifan Li
NEW ZEALAND
0
0
CGTR COMMODORE AMIGA COASTERI want to try PCB for making coaster.I hope you like it.Diameter is 99mmMany thanks to designer artist Esref KAYINhttps://www.esrefkayin.com/Ps. Silkscreen print may have s...
CGTR COMMODORE AMIGA COASTER
3416
3
5
(DIY) C64iSTANBUL
(DIY) C64iSTANBUL
TURKEY
743
825
This board and it's firmware was designed by a team of Russian engineers and it is one of the best aftermarket ECU options for most older imports. It has just as much features as a standard aftermarke...
Frankeso - DIY EFI Engine Controller (Supports a wide variety of vehicles)
3722
0
5
Joshua Auten
Joshua Auten
UNITED STATES OF AMERICA
3
0
it's a bord can help a power bank from 5V to 12 v
Power Bank circuit
2006
0
2
Dengra Abdelhamid
Dengra Abdelhamid
0
0
A component for the Open Source - Very Large Stick microcontroller system.https://github.com/RightRudderLeftStick/OpenSource-VeryBigStickThis PCB allows you to easily breakout the required IO from eit...
Open Source Very Large Stick - Freejoy & MMjoy2 breakout board
4394
0
2
Right Rudder Left Stick
Right Rudder Left Stick
POLAND
6
2
This is esp32-wrover adaptor
W346879AX1C1_Egon-Board-ESP32-Wrover-Dev-Board-master
1962
0
0
stockman
stockman
0
0
Sensors Board can be used for sensor fusion in projects that require accurate direction heading and positioning. It makes use of InvenSense ICM20948 and Quectel L86 GPS.In addition to this, the board ...
Sensor fusion board - ICM20948 & Quectel L86 GPS
310
0
0
Mircea
Mircea
NETHERLANDS, THE
0
1
This project presents a compact and reliable DIY buzzer module designed to provide clear audible alerts and notifications in embedded systems. Built to work seamlessly with both 3.3 V and 5 V logic le...
Diy Buzzer Module
497
0
0
Nirmal Maa
Nirmal Maa
UNITED STATES OF AMERICA
13
2
To learn more, please check out my Hackaday!https://hackaday.io/project/187343/log/227827There are a few upgrades made within this design! Let's go over a few;Thanks to Summer (https://github.com...
The PsuedoPancakes v2: WE MUST GO HIGHER
2253
3
1
Walker Dev
Walker Dev
UNITED STATES OF AMERICA
2
0
A mini virtual pinball cabinet is a smaller version of a traditional pinball cabinet usually designed for home use and can be a great alternative for pinball enthusiasts who may not have the spa...
DIY Mini Virtual Pinball Cabinet
2140
0
2
Mirko Pavleski
Mirko Pavleski
NORTH MACEDONIA
135
0
При работе с батареями (аккумуляторами), импульсными (SMPS) или любыми другими источниками питания часто возникает потребность в проверке их работы в различных условиях, то есть под различной нагрузко...
Электронная нагрузка 1ч. начало
3757
0
1
Yuray Yura
Yuray Yura
UKRAINE
76
31
This time I will show you how to make an interesting interactive game, on a 32 by 8 LED matrix, which is controlled by moving the device. During a certain movement of the device, the MPU60...
Arduino MPU6050 Interactive scrolling game on 32x8 Led Matrix
2481
0
1
Mirko Pavleski
Mirko Pavleski
NORTH MACEDONIA
135
0
1
2
3