Components




Description
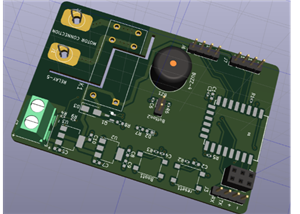
esp32 bassed transmitter and reciever
ESP32 BASSED TRANSMETER AND RECEIVER
Code
Arduino
// TRANSMETER CODE
#include <esp_now.h>
#include <WiFi.h>
// REPLACE WITH YOUR RECEIVER MAC Address
uint8_t receiverMacAddress[] = {0xAC,0x67,0xB2,0x36,0x7F,0x28}; //AC:67:B2:36:7F:28
struct PacketData
{
byte lxAxisValue;
byte lyAxisValue;
byte rxAxisValue;
byte ryAxisValue;
byte switch1Value;
byte switch2Value;
byte switch3Value;
byte switch4Value;
byte switch5Value;
byte switch6Value;
byte switch7Value;
byte switch8Value;
};
PacketData data;
//This function is used to map 0-4095 joystick value to 0-254. hence 127 is the center value which we send.
//It also adjust the deadband in joystick.
//Jotstick values range from 0-4095. But its center value is not always 2047. It is little different.
//So we need to add some deadband to center value. in our case 1800-2200. Any value in this deadband range is mapped to center 127.
int mapAndAdjustJoystickDeadBandValues(int value, bool reverse)
{
if (value >= 2200)
{
value = map(value, 2200, 4095, 127, 254);
}
else if (value <= 1800)
{
value = (value == 0 ? 0 : map(value, 1800, 0, 127, 0));
}
else
{
value = 127;
}
if (reverse)
{
value = 254 - value;
}
Serial.println(value);
return value;
}
// callback when data is sent
void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status)
{
Serial.print("\r\nLast Packet Send Status:\t ");
Serial.println(status);
Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Message sent" : "Message failed");
}
void setup()
{
Serial.begin(115200);
WiFi.mode(WIFI_STA);
// Init ESP-NOW
if (esp_now_init() != ESP_OK)
{
Serial.println("Error initializing ESP-NOW");
return;
}
else
{
Serial.println("Succes: Initialized ESP-NOW");
}
esp_now_register_send_cb(OnDataSent);
// Register peer
esp_now_peer_info_t peerInfo;
memcpy(peerInfo.peer_addr, receiverMacAddress, 6);
peerInfo.channel = 0;
peerInfo.encrypt = false;
// Add peer
if (esp_now_add_peer(&peerInfo) != ESP_OK)
{
Serial.println("Failed to add peer");
return;
}
else
{
Serial.println("Succes: Added peer");
}
pinMode(15,INPUT_PULLUP);
pinMode(16,INPUT_PULLUP);
pinMode(17,INPUT_PULLUP);
pinMode(18,INPUT_PULLUP);
pinMode(19,INPUT_PULLUP);
pinMode(21,INPUT_PULLUP);
pinMode(22,INPUT_PULLUP);
pinMode(23,INPUT_PULLUP);
}
void loop()
{
data.lxAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(32), false);
data.lyAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(33), false);
data.rxAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(34), false);
data.ryAxisValue = mapAndAdjustJoystickDeadBandValues(analogRead(35), false);
data.switch1Value = !digitalRead(15);
data.switch2Value = !digitalRead(16);
data.switch3Value = !digitalRead(17);
data.switch4Value = !digitalRead(18);
data.switch5Value = !digitalRead(19);
data.switch6Value = !digitalRead(21);
data.switch7Value = !digitalRead(22);
data.switch8Value = !digitalRead(23);
esp_err_t result = esp_now_send(receiverMacAddress, (uint8_t *) &data, sizeof(data));
if (result == ESP_OK)
{
Serial.println("Sent with success");
}
else
{
Serial.println("Error sending the data");
}
delay(50);
}
// RECEIVER CODE
#include <esp_now.h>
#include <WiFi.h>
#include <ESP32Servo.h>
#define SIGNAL_TIMEOUT 1000 // This is signal timeout in milli seconds. We will reset the data if no signal
unsigned long lastRecvTime = 0;
struct PacketData
{
byte lxAxisValue;
byte lyAxisValue;
byte rxAxisValue;
byte ryAxisValue;
byte switch1Value;
byte switch2Value;
byte switch3Value;
byte switch4Value;
byte switch5Value;
byte switch6Value;
byte switch7Value;
byte switch8Value;
};
PacketData receiverData;
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
int led1 = 15;
int led2 = 16;
int led3 = 17;
int led4 = 18;
int led5 = 19;
int led6 = 21;
int led7 = 22;
int led8 = 23;
//Assign default input received values
void setInputDefaultValues()
{
// The middle position for joystick. (254/2=127)
receiverData.lxAxisValue = 127;
receiverData.lyAxisValue = 127;
receiverData.rxAxisValue = 127;
receiverData.ryAxisValue = 127;
receiverData.switch1Value = LOW;
receiverData.switch2Value = LOW;
receiverData.switch3Value = LOW;
receiverData.switch4Value = LOW;
receiverData.switch5Value = LOW;
receiverData.switch6Value = LOW;
receiverData.switch7Value = LOW;
receiverData.switch8Value = LOW;
}
void mapAndWriteValues()
{
servo1.write(map(receiverData.lxAxisValue, 0, 254, 0, 180));
servo2.write(map(receiverData.lyAxisValue, 0, 254, 0, 180));
servo3.write(map(receiverData.rxAxisValue, 0, 254, 0, 180));
servo4.write(map(receiverData.ryAxisValue, 0, 254, 0, 180));
digitalWrite(led1, receiverData.switch1Value);
digitalWrite(led2, receiverData.switch2Value);
digitalWrite(led3, receiverData.switch3Value);
digitalWrite(led4, receiverData.switch4Value);
digitalWrite(led5, receiverData.switch5Value);
digitalWrite(led6, receiverData.switch6Value);
digitalWrite(led7, receiverData.switch7Value);
digitalWrite(led8, receiverData.switch8Value);
}
// callback function that will be executed when data is received
void OnDataRecv(const esp_now_recv_info* info, const uint8_t* incomingData, int len)
{
if (len == 0)
{
return;
}
memcpy(&receiverData, incomingData, sizeof(receiverData));
mapAndWriteValues();
lastRecvTime = millis();
}
void setUpPinModes()
{
servo1.attach(14);
servo2.attach(26);
servo3.attach(25);
servo4.attach(33);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(led6, OUTPUT);
pinMode(led7, OUTPUT);
pinMode(led8, OUTPUT);
setInputDefaultValues();
mapAndWriteValues();
}
void setup()
{
setUpPinModes();
Serial.begin(115200);
WiFi.mode(WIFI_STA);
// Init ESP-NOW
if (esp_now_init() != ESP_OK)
{
Serial.println("Error initializing ESP-NOW");
return;
}
esp_now_register_recv_cb(OnDataRecv);
}
void loop()
{
//Check Signal lost.
unsigned long now = millis();
if ( now - lastRecvTime > SIGNAL_TIMEOUT )
{
setInputDefaultValues();
mapAndWriteValues();
}
}
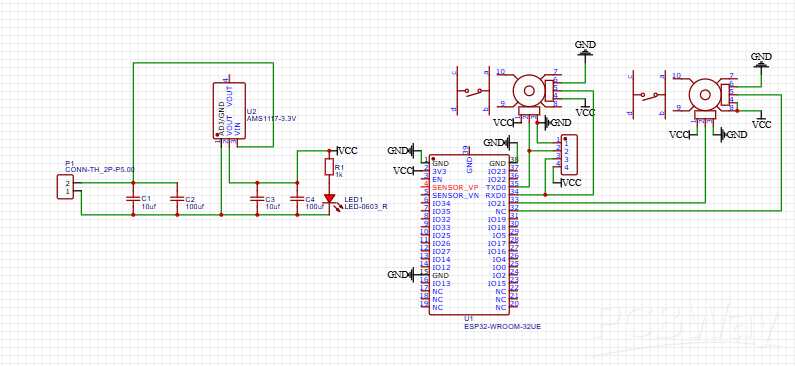
Schematic and Layout
Screenshot 2025-01-10 230257.png
Dec 15,2024
491 views
esp32 bassed transmitter and reciever
Transmitter and receiver
491
1
0
Published: Dec 15,2024
Standard PCB
BOM(Bill of materials)
PCBWay Donate 10% cost To Author
File Last Updated: 2025/01/11 (GMT+8)
File update record
2025-01-1101:34:33
Parts List (BOM) is updated.
2025-01-1101:34:33
Gerber file is updated.
Only PCB
PCB+Assembly
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.



Under the
Attribution-ShareAlike (CC BY-SA)
License.














Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW





- Comments(0)
- Likes(1)
Upload photo
You can only upload 5 files in total. Each file cannot exceed 2MB. Supports JPG, JPEG, GIF, PNG, BMP
0 / 10000
You may also like
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
2671 0 5 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3154 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
3417 2 2 -
-
-