
|
|
ESP32-S3-WROOM-1-N16R8ESPRESSIF
|
x 1 | |
|
|
INMP441 MICROPHONEInvenSence
|
x 4 | |
|
|
OLED Display 0.96 I2C 128x64 |
x 1 | |
|
|
WP7113GDKingbright
|
x 1 |

|
KiCad 9.0 |
|

|
Edge Impulse Studio |
SirenSense Ambulance Detection System
Project Overview: SirenSense
Check out my youtube video to understand better how the device works !
I live in a busy city where driving during rush hour is a daily reality. I noticed that when an ambulance is nearby, I often only realize whether it is behind or in front of me a few seconds before it passes. Many of my friends face the same issue; because our roads are congested and filled with buildings and tunnels, sound echoes become a major problem. This is the primary reason for the confusion, which can be quite dangerous. Emergency vehicles need every second to reach their destination, whether it is a hospital or a patient.
I have been developing this device for the past three months while studying computer engineering. My first version suffered from high lag when locating the siren source; the second version was a significant improvement but was too expensive and did’nt perform as good as the third . My third version, however, is the most efficient regarding performance and power consumption, and it is the most affordable to produce.
Evolution of the Prototype:
-Version 1: ~$65 (High lag)
-Version 2: ~$80 (High cost)
-Version 3 (Current): $20 – $25 (Optimized performance)
The main reason I created this is to improve road safety and potentially help save lives. Below I’ll explain how the device works.

How It Works
At its core, SirenSense combines a quad-microphone array with Artificial Intelligence to solve sound localization in complex environments. By treating sound as visual data, the device can "see" through the echoes and tunnels that typically confuse the human ear.
The Technical Breakdown
To achieve high-end performance on a $25 budget, I focused on three main pillars: Audio Capture, Artificial Intelligence, and Spatial Logic.
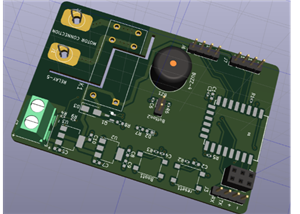
1. Quad-Channel Audio Capture
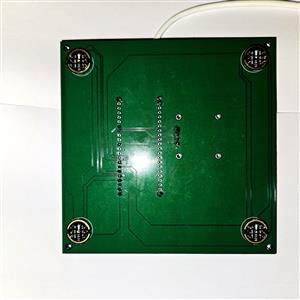
The device utilizes four digital I2S microphones arranged in a square pattern: Front-Left, Front-Right, Rear-Left, and Rear-Right.
-High-Speed Sampling: Audio is captured at 16,000Hz, ensuring every frequency of the siren is recorded.
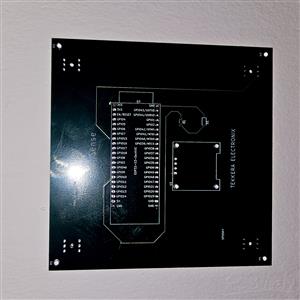
-PSRAM Integration: Using the ESP32-S3 (N16R8), the system utilizes 8MB of Octal PSRAM to store a full 1-second history for all four channels without slowing down the CPU.
· 
2. The AI "Brain" (TinyML)
Instead of using traditional hardware filters—which proved impossible in my early testing—I implemented a Convolutional Neural Network (CNN).
-Spectrogram Analysis: The AI converts raw audio into a spectrogram (a visual representation of frequencies)
to find the unique fluctuating pattern of a siren.
-Reliability: The model is highly optimized, achieving around 90% Accuracy.
-Speed: Inference happens in less than 500ms, which is critical when a vehicle is approaching at high speed.
3. Data Collection and Training
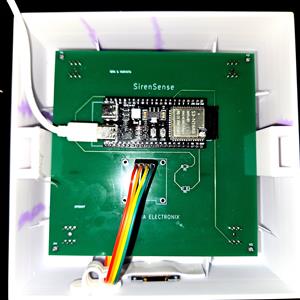
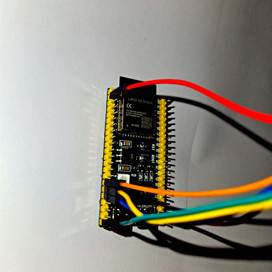
To identify the difference between a siren and everyday city sounds, I used a dedicated recording rig consisting of an INMP441 microphone and an ESP32-S3.
Noise Profiles: I recorded road noise, music, car engines, brakes, horns, and conversations, labeling them as "Noise".
Siren Profiles: I recorded sirens near hospitals to ensure proper identification.
Traffic Optimization: To solve detection issues in loud environments, I specifically trained the model to identify sirens buried within heavy traffic noise , rain , wend , you name it .
Heres a picture of what I made to record data to train the device with , its an ESP32 S3 , same as the other one , and the same mic too.

4. Spatial Vector Mapping
Once the AI confirms a siren is detected, the system calculates the direction using Vector Summation.
Energy Analysis: Each microphone finds an arrow in its direction based on the sound's energy.
Smoothing Filter: I implemented an exponential smoothing filter so the arrow glides smoothly toward the source rather than jumping around due to wind or echoes. I also add some foam inside the white box to ensure better isolation between all 4 mics and protection from heavy wends.
Cost & Efficiency Comparison
The breakthrough in Version 3 was moving away from expensive analog filters and dedicated DSP chips. Instead, I utilized pure software optimization on a single ESP32, drastically reducing the bill of materials while maintaining high performance.
Safety-First Design
The interface is designed to be non-distracting for the driver:
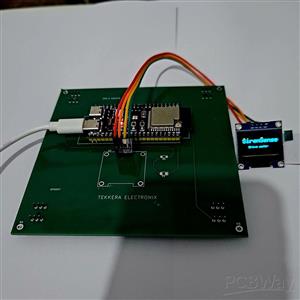
-Splash Screen: On startup, the screen displays "SirenSense: Drive safer".
-Self-Diagnostic: For the first 10 seconds, the device runs a microphone health check to ensure all four sensors are functioning correctly.
-Minimalist UI: When a siren is detected, a simple compass and arrow appear. There are no distracting numbers or text—just a clear visual cue of the emergency vehicle's location.
-Signal Persistence: The arrow stays on the screen for 2.5 seconds after the sound fades, giving the driver enough time to check their mirrors and move over safely.

Main Goal
By making this technology affordable and compact, I hope to see it integrated into every dashboard to help emergency vehicles navigate cities faster. While a few high-end car manufacturers offer similar features, safety should not be a privilege for the rich. My device can be implemented in any car, well , literally anywhere.

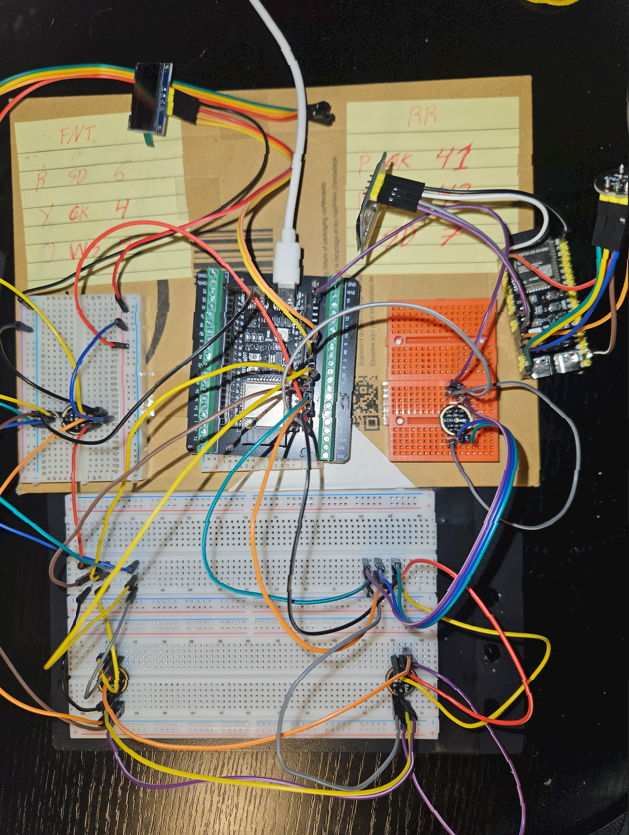
And heres an early version of the device in testing phase before designing the PCB .
CHECK THE VIDEO IN CASE YOU FORGOT :)
SirenSense Ambulance Detection System
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.

















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW





- Comments(0)
- Likes(2)
- 1 USER VOTES
- YOUR VOTE 0.00 0.00
-
10design
-
10usability
-
10creativity
-
10content
More by Ibrahim TKR
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
1876 0 5 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
2475 3 7 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
2552 2 0 -
-
-
-
ESP32-C3 BLE Keyboard - Battery Powered with USB-C Charging
2663 0 2 -