










|
|
RDK X5 Developer KitD-Robotics
|
x 1 | |
|
|
TTG T-DisplayLilyGO
|
x 1 | |
|
|
Official Raspberry Pi Camera V2Raspberry Pi
|
x 1 |

|
ROSOpen Source Robotics Foundation
|
|

|
Visual Studio CodeMicrosofe
|
|

|
PlatformIOPlatformIO Labs
|
TeaTime - AIoT Tea Service Detection System
TeaTime: Local AIoT Tea Service Detection System
What's my project about?
TeaTime is a context-aware AIoT system designed to solve a simple yet persistent office problem: missing the tea or coffee service while deeply focused or wearing noise-canceling headphones. It serves as a personal "lookout," using computer vision to detect the specific uniform of service staff and instantly notifying you on a dedicated desktop display.
This project bridges the gap between high-performance Edge AI and practical, daily utility. It operates entirely on a local network (no cloud dependencies), ensuring privacy while delivering real-time alerts.
Why did I decide to make it?
In many office environments, the "tea break" is a crucial ritual for productivity and social connection. However, when you are "in the zone" -coding, writing, or in deep work mode, it's easy to tune out the background noise of the service cart passing by.
I built TeaTime because:
- Focus vs. FOMO: I wanted to maintain deep focus without the "Fear Of Missing Out" on coffee or tea.
- Privacy-First AI: I wanted to demonstrate that useful AI doesn't need to send video feeds to the cloud. All processing happens locally on the edge device.
- Hardware Integration: It was a perfect opportunity to combine powerful Edge AI processors (like the RDK X5) with lightweight IoT microcontrollers (ESP32) in a practical application.
How does it work?
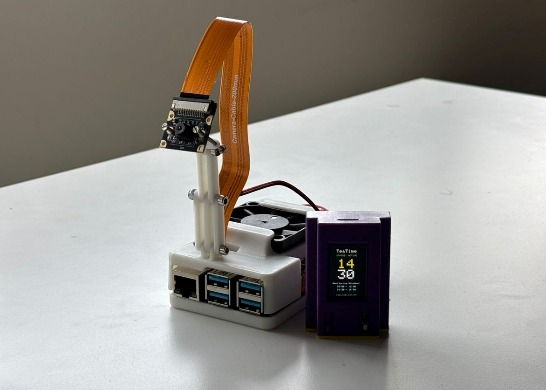
The system consists of two main hardware nodes communicating over a local WiFi network:
1. The Edge AI Node (The "Brain")
This node uses an RDK X5 (Horizon Robotics) developer board equipped with a camera. It runs a ROS2 (Robot Operating System) pipeline that:
> Detects People: Uses an FCOS (Fully Convolutional One-Stage) object detection model to identify humans in the corridor.
> Verifies Uniforms: Extracts the upper body of detected persons and analyzes the color spectrum (HSV) to confirm they are wearing the specific purple uniform of the tea service staff.
> Checks Context: Validates detections against specific time windows (e.g., 10:00-12:00 and 14:30-16:00) to filter out false positives.
Code Snippet (Python - Edge Node):
1 # Logic to check uniform color and trigger alert
2 if is_uniform and self.is_time_in_window():
3 self.get_logger().info(f"[DETECT] Tea Staff detected! Purple %: {percent:.2f}%")
4 self.send_alert(confidence)
2. The IoT Alert Node (The "Notifier")
This is a TTGO T-Display (ESP32) sitting on the user's desk. It connects to WiFi and runs a lightweight HTTP server.
- Idle Mode: Displays a digital clock and system status.
- Alert Mode: When it receives a POST request from the Edge Node, it flashes the screen purple and displays "TEA ARRIVED" along with the timestamp.
Code Snippet (C++ - IoT Node):
1 // Handling the alert on ESP32
2 if (event && strcmp(event, "tea_service_detected") == 0) {
3 drawAlertScreen(timestamp); // Flashes the screen
4 server.send(200, "text/plain", "Alert Received");
5 }
System Flow
1. Camera captures the hallway.
2. Edge Node detects a person + purple uniform.
3. Edge Node sends POST /alert to the ESP32 IP address.
4. ESP32 flashes the notification on your desk.
Hardware Used:
* Compute: Horizon Robotics RDK X5 (Edge AI)
* Microcontroller: TTGO T-Display ESP32
* Camera: MIPI / USB Webcams
* Software: ROS2 , OpenCV, PlatformIO
TeaTime - AIoT Tea Service Detection System


















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW


- Comments(3)
- Likes(2)
 More by Nik N
More by Nik N
-
Programmable Mist Maker - XIAO / QT PY Extension
1182 2 1 -
RadioHAT - Raspberry Pi radio development platform
986 0 2 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3402 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
4025 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4418 2 2





















