PCBWay Community
Search title or content
Search
PCBWay
PCB Instant Quote
CNC | 3D Printing
Login
Sign Up
More Notifications
No notifications.
My Profile
My projects
My Likes
My Deals
My Goods for Bazaar
Settings
Sign Out
Projects
Categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
View all categories
By Source Files
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Tad Boy Color
SummerCart64 - a fully open source N64 flashcart
kv4p HT v1.7b
QuinLED-Dig-Uno
Bike Fingerprint - PCB
Arduino RC engine sound & light controller with inertia simulation for ESP32
Solar Powered WiFi Weather Station V2.0
Frog Boy Color
SIDKick pico 0.2 (SID 6581/8580-replacement for C64/C128)
View all source files projects
Featured Projects
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Featured
Source Files
Video
View all projects
Questions
Sponsorships
Feedback
Blog
Store
PCB Design
Contest
- 2026 KiCad PCB Design Contest
- 8th Project Design Contest
- 7th Project Design Contest
- KiCad Design Contest
- 6th Project Design Contest
- 5th PCB Design Contest
- 4th PCB Design Contest
- Raspberry Pi Pico Contest
- PCB Design Tutorial
- 3rd PCB Design Contest
- I CAN SOLDER Kit Contest
- 2nd PCB Design Contest
- 1st PCB Design Contest
Add questions
Create a project
Please verify your email address so that you can enjoy our more comprehensive services.
Wearables
Weather
All categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
3D Printing
Blinkenlights
Calculator
Camera
Clocks
CNC
Educational
Automotive
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Keyboards
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Raspberry Pi
Radio
Retro Stuffs
Space & Satellite
Sensors
Software
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
Project by top creative fields
All categories
3D Printing
Arduino
Audio
Automotive
Blinkenlights
Breakout Board Projects
Calculator
Camera
Clocks
CNC
Computers & USB
DIY Electronics
Educational
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Hardware
Home Automation
IoT
Keyboards
LED Displays & Matrices
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Radio
Raspberry Pi
Retro Stuffs
Robotics
Sensors
Software
Space & Satellite
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
View all categories
Flight
Aircraft managed by a remote control station (including remotely piloted or autonomously flying). The essence of the drone is to use electronic equipment instead of the pilot to fly the aircraft.
All tags
Drone
Flight Controller
Flight
GPS
UAV
TVC
Create a project
Sort by : Trending
Trending
Score
Likes
Views
Discuss
Newest
Featured
Source Files
3D Design
Video
Autonomous Flight Control System - AFCS MK5This was previously the APEX Flight Computer, however it is now redesigned to host a more advanced avionics suite. Autonomous Flight Control System MK5 or AF...
AFCS-MK5 (Autonomous Flight Control System )
3959
13
10
Heer Patel
Heer Patel
UNITED STATES OF AMERICA
6
0
Who are the Aphelion Rocket Team?Our team has 8 members from Turkey. We are all 18 years old "space lover" students and am in avionic part our rocket named "ISTIKBAL-02". The competition we are prepar...
Aphelion Rocket Team Flight Controller
3869
1
11
Atlas Atlas
Atlas Atlas
TURKEY
9
0
This Project Drone that utilize the familiar Arduino Environment and Development board they already at hand with promising results . this board integrate power distribution , sensors and pins for vari...
Drone Shield for Arduino
11576
3
7
clifford Co
clifford Co
PHILIPPINES, THE
3
0
Our submission for the pcbway design contest 2026 is a custom flight controller board compatible with the ardupilot firmware and has the following features:Dual IMU sensorsDual Barometer sensorsExtern...
Alex_eagles Flight controller
879
6
8
Engineer
Engineer
EGYPT
2
0
Core Flight Technologies is an R&D company that works on full motion flight simulators.We're opening our designs to everyone who want to make homecockpit systems.The board can be used to control i...
Flight Simulator Input Board (48 Input)
4967
2
9
Core Flight Technologies
Core Flight Technologies
12
0
My Project: An ESP32 Mini DroneMy project is a custom-designed, open-source PCB for a mini, four-motor quadcopter powered by an ESP32 microcontroller. The goal is to create an affordable and accessibl...
Build your own ESP32 Drone!
3551
1
5
Rahul Guiris
Rahul Guiris
UNITED KINGDOM
0
0
This is a small PCB we made to make our own Drone, it uses an ESP32 and an MPU-6050 for the Axis control. Motor control is done with PWM.We are still busy programming it and will share when the code i...
Drone Flight Controller using ESP32
14181
7
5
PlumPot
PlumPot
NETHERLANDS, THE
18
0
All information can be found here: (Parts, details, etc.) https://www.youtube.com/watch?v=WBDUZI4aG9s&t=7sREAD! There is a 3mf file at the top, that is saved as a project, so it has stl's inside o...
P-51 Mustang From WWII!
1839
0
2
Robert G Ritz
Robert G Ritz
UNITED STATES OF AMERICA
0
0
Hi, I am Rahim ?zkaymak. I am 16 and I live in Turkey. MACH ONE is a rocket flight computer featuring a ATSAMD51 microcontroller, BNO085 9DOF IMU and DPS310 barometric pressure sensor. It has 3 high c...
MACH ONE Flight Computer
2683
0
2
Cem GUL
Cem GUL
UNITED STATES OF AMERICA
1
0
If you've ever flown an RC airplane and wanted to know exactly what happened during a flight — the altitude, orientation, temperature, and a visual record — most off-the-shelf FPV systems won't help y...
ESP32 RC Plane Camera Flight Recorder with Dashboard
564
0
0
Engineer
Engineer
UNITED STATES OF AMERICA
0
0
NoahFC — Open Hardware Flight Controller for EveryoneNoahFC is an open-source, fully documented flight controller platform designed to make aerial robotics accessible, affordable, and endle...
NoahFC - Atmega328 Flight Controller
743
3
1
Bosko Petreski
Bosko Petreski
NORTH MACEDONIA
2
26
The goal of the project was to show that no microcontroller is needed to control the timing between LEDs. Instead, this project uses purely analog NE556 Dual Timer modules, in which pulse timings depe...
Fully analog LED Aircraft Lighting Simulator based on NE556
228
0
2
Wojciech Lacheta
Wojciech Lacheta
POLAND
0
0
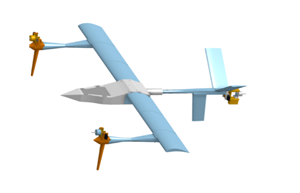
R.A.M.P.A.T.Rapid, Affordable, Modular, Printed, Aerial Tiltrotor for Emergency ResponseWhat is your project about?R.A.M.P.A.T. is a complete, 3D-printable tiltrotor VTOL system for disaster response....
Disaster-Response VTOL Flight Controller
403
0
2
Aarit
Aarit
UNITED STATES OF AMERICA
0
0
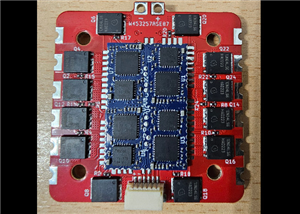
Open source brushless ESC for quadcopters. Uses standard 30.5mm mounting. Runs the common open source AM32 firmware and supports the DShot protocol. Can be used for driving brushless DC motors in most...
4X ESC for quadcopters
547
0
1
Pera Peric
Pera Peric
SERBIA, REPUBLIC OF
0
36
AFCS Mk5 is a compact, AIoT-enabled flight computer for small rockets. It combines sensor fusion, physics-based calculations, and feedback control to actively stabilize a rocket while logging telemetr...
Autonomous Flight Control System - AFCS MK5 B
627
0
1
Heer Patel
Heer Patel
UNITED STATES OF AMERICA
6
0
Antonov An-32 Engine Nacelles.The main difference from the other family members of the An-24, An-26 and An-30 members of the small twin turboprop family of soviet/ukrainian aircraft is the larger Ivch...
Antonov An-32 1/144 Nacelles
590
0
1
Engineer
Engineer
AUSTRIA
0
1
1
2