





|
KiCad 9.0 |
|

|
arduino IDEArduino
|
Autonomous Maze Solver Robot
Project Overview
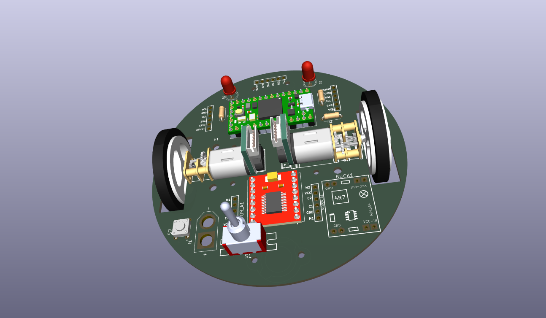
This project is an autonomous maze-solving robot designed specifically for maze solver competitions, where speed, precision, and reliability are critical. The robot is capable of independently sensing its environment, making navigation decisions in real time, and traversing complex maze paths without any external control.
The entire system is built around a compact circular PCB with a radius of 10 cm, optimizing space utilization, balance, and maneuverability while keeping the design clean and competition-ready.
Motivation Behind the Project
Maze-solving robots are a perfect blend of embedded systems, control algorithms, sensor fusion, and power electronics. The goal of this project was to design a robot that is:
- Fast and responsive
- Electrically efficient
- Compact and mechanically stable
- Easily scalable for future upgrades
By using high-performance components like the Teensy 4.0 and Time-of-Flight (ToF) sensors, the bot achieves accurate distance sensing and high-speed decision making—both essential for competitive environments.
Control & Processing
At the core of the robot is the Teensy 4.0 microcontroller, chosen for its high clock speed and excellent real-time performance. It handles:
Continuous sensor data acquisition
- Real-time distance calculations
- Maze-solving logic (e.g., wall following or flood-fill algorithms)
- Motor speed and direction control
The processing power of the Teensy allows rapid response to changing maze conditions, enabling smoother turns and faster traversal.
Obstacle Detection & Sensing
The robot uses three VL53L1X Time-of-Flight sensors for accurate and reliable distance measurement:
Front Sensor – Detects obstacles directly ahead
Left Sensor – Monitors left wall distance
Right Sensor – Monitors right wall distance
These sensors provide precise, non-contact distance readings, allowing the robot to maintain optimal spacing from maze walls and make intelligent navigation decisions even at higher speeds.
Motor Drive & Locomotion
Motion is achieved using N20 geared DC motors paired with 34 mm diameter wheels, providing an excellent balance between torque and speed.
Motor control is handled by the TB6612FNG motor driver, which offers:
- Efficient dual motor control
- Low heat generation
- Precise speed and direction control via PWM
This setup ensures smooth acceleration, accurate turns, and consistent movement throughout the maze.
Power Management
The robot is powered by an 11.1V 3S LiPo battery (850 mAh), delivering ample energy for extended operation during competitions.
To safely power the electronics, a MINI MP1584 DC-DC buck converter is used to step down the battery voltage to required logic and motor levels. This ensures:
- High efficiency
- Stable voltage output
- Protection of sensitive components
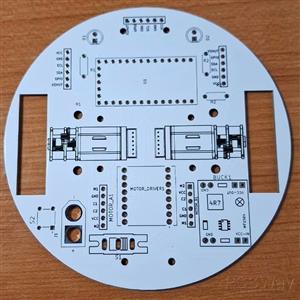
Mechanical & PCB Design
PCB Shape: Circular
PCB Radius: 10 cm
The circular PCB design improves symmetry and weight distribution, enhancing stability during high-speed turns. All components are carefully placed to minimize wiring, reduce noise, and improve serviceability.
Conclusion
This autonomous maze solver robot is a compact, high-performance system built with competition use in mind. By combining a powerful microcontroller, precise ToF sensors, efficient motor control, and a well-designed power system, the robot is capable of fast, reliable, and intelligent maze navigation. (Arduino Code for this bot will be uploaded in github soon)
The design is modular, upgrade-friendly, and serves as a strong foundation for further enhancements such as encoder feedback, advanced algorithms, or wireless debugging. 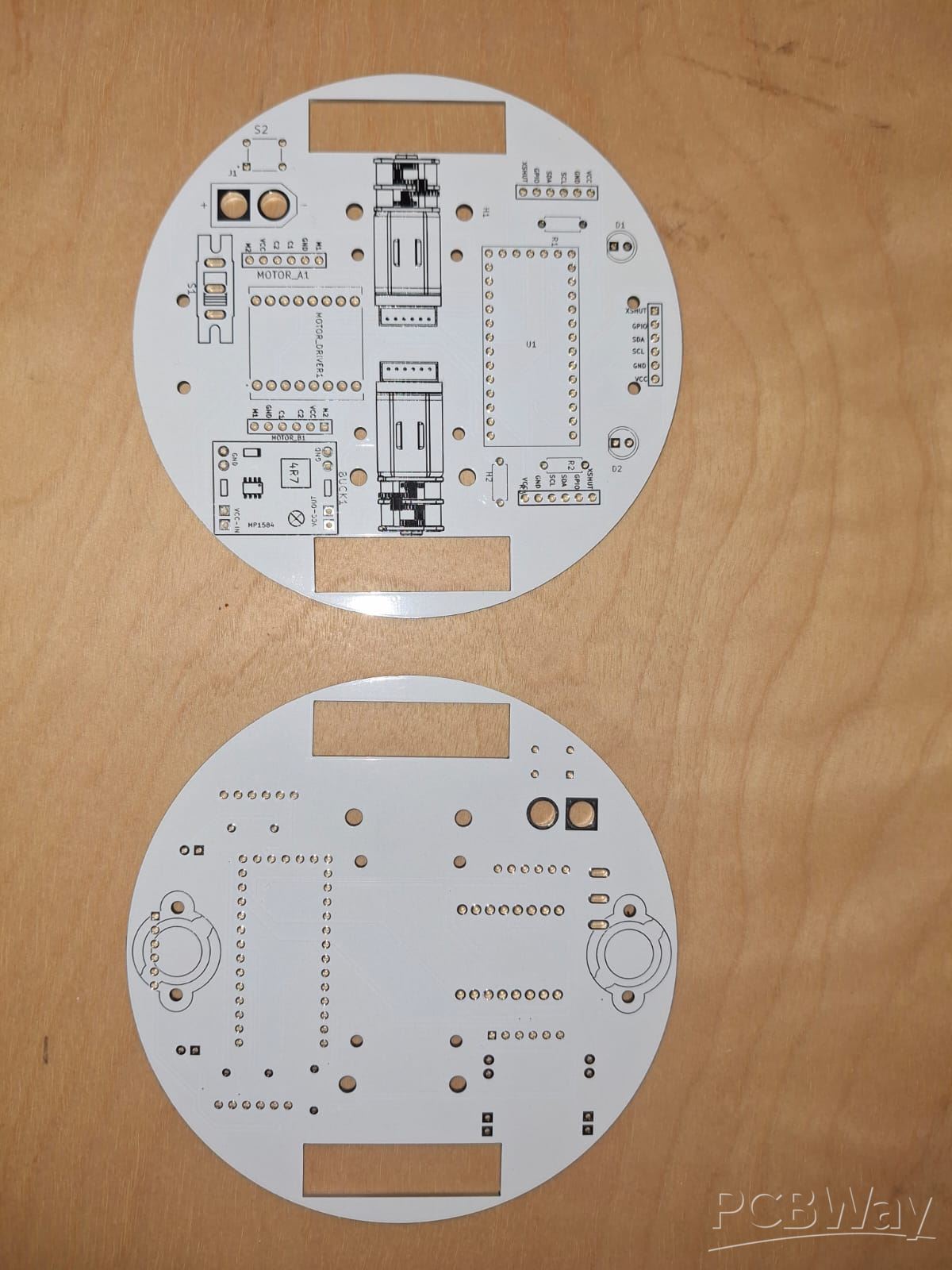
Autonomous Maze Solver Robot
Project images are for reference only. Actual production is based on the manufacturing files on the project page.
Please review the designer's notes (e.g., PCB thickness) and select the appropriate options.
PCBWay is not responsible
for issues caused by unsuitable parameter selections.
For more important ordering information, please refer to
Read More


















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW



- Comments(0)
- Likes(0)
 More by Engineer
More by Engineer
-
Programmable Mist Maker - XIAO / QT PY Extension
1061 2 1 -
RadioHAT - Raspberry Pi radio development platform
860 0 2 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3322 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3929 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4315 2 2





















