




|
fusion360 |
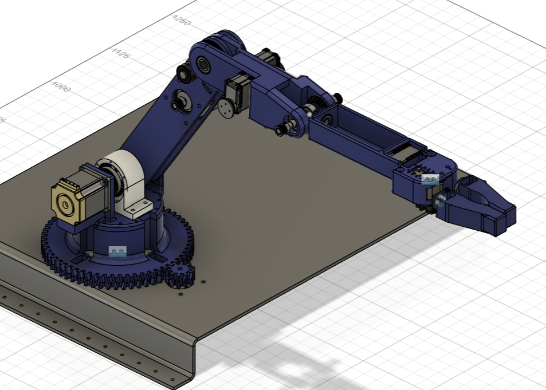
6 DOF Robotic Arm
This project is a fully custom-designed 6 Degrees of Freedom robotic arm built to deliver precise, stable, and efficient motion for tasks such as pick-and-place, sorting, assembly, and object manipulation.
I wanted to try making a robotic arm since i watched iron man so i did
The arm operates using six independent joints
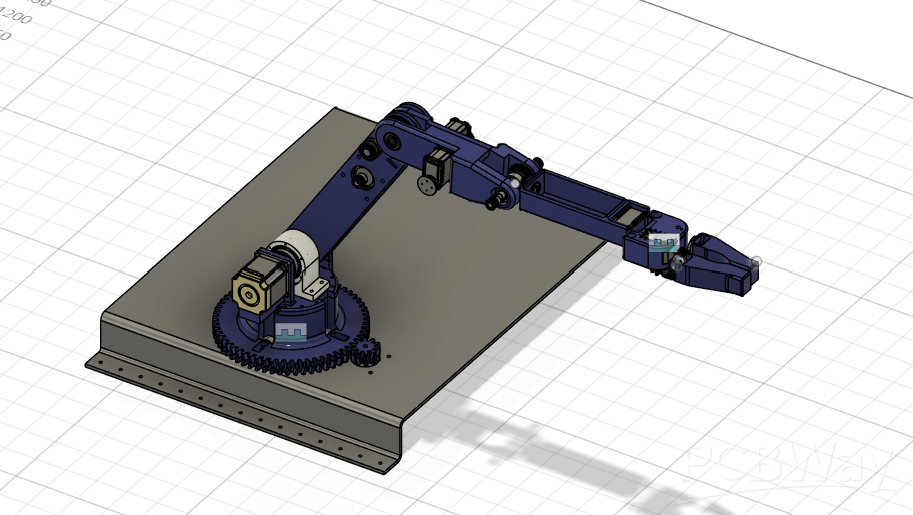
1st DOF – Base Rotation (Herringbone Gear Drive)
The base uses a large herringbone gear for smooth, backlash-free rotation. The gear’s dual-helix structure increases strength and stability, allowing the base to handle high loads while rotating with precision.
2nd DOF – Shoulder Joint (Harmonic Drive)
This joint uses a harmonic gear mechanism to achieve extremely high torque and near-zero backlash. It provides very fine control over the arm’s main lifting motion—ideal for heavy payloads and accurate positioning.
3rd DOF – Elbow Joint (Timing Pulley System)
A timing belt and pulley assembly powers the elbow, offering lightweight, efficient, and responsive movement. It reduces weight on the arm while still maintaining consistent, slip-free transmission.
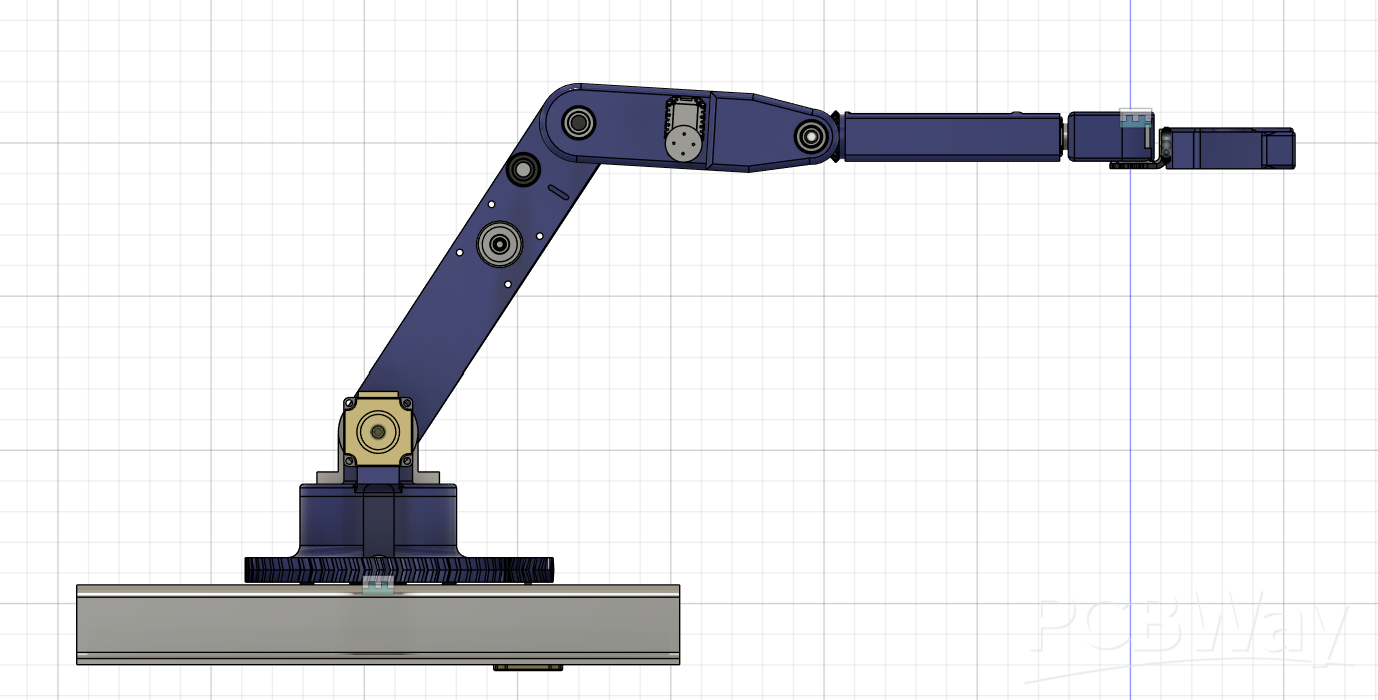
4th & 5th DOF – Wrist Pan and Tilt Mechanism
These two DOFs form a compact pan-tilt unit. This allows the wrist to orient the end-effector in multiple directions with smooth, coordinated rotational motion—important for precise alignment during task execution.
6th DOF – Wrist Roll (Twist Joint)
The final DOF is a simple twist/roll joint that rotates the gripper or tool. This enables tasks like screwing, rotating objects, aligning parts, and fine manipulation during pick-and-place operations.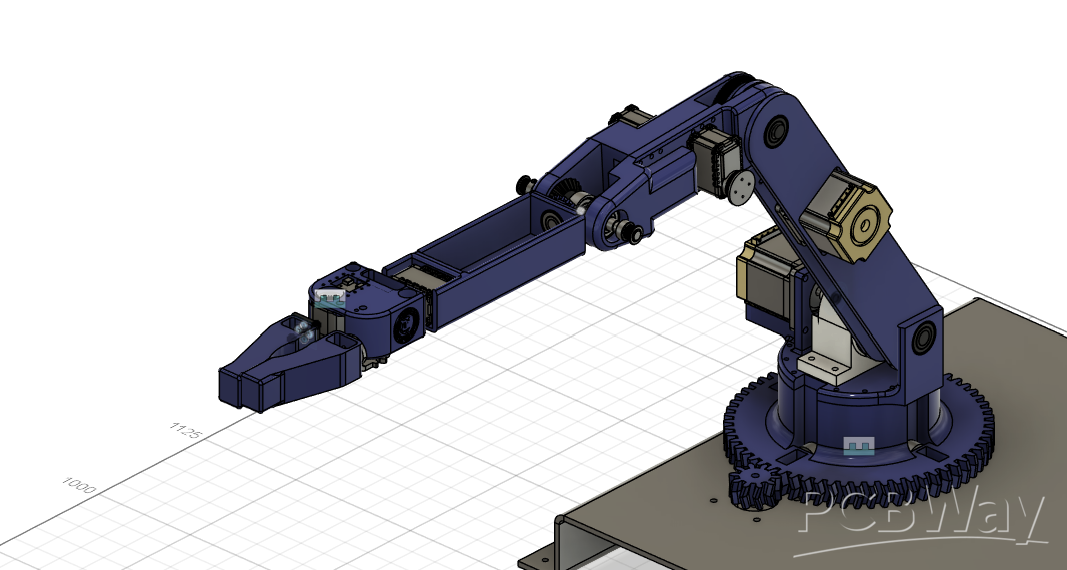
6 DOF Robotic Arm

















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW





- Comments(2)
- Likes(1)
 More by Engineer
More by Engineer
-
Programmable Mist Maker - XIAO / QT PY Extension
172 0 0 -
RadioHAT - Raspberry Pi radio development platform
182 0 1 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
2767 0 5 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3275 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
3529 2 2





















