





Robot Maze Robot
This board is a competitive-grade, bare-metal controller specifically designed for high-speed wall-following robots and maze solvers. Built around the reliable and compact Arduino Nano, this platform is battle-tested with a strict focus on sensor topology and low-level software optimization. Variations of this exact control logic and hardware layout have powered robots that have secured over 35 medals in competitive robotics circuits!
See it in Action!
TikTok Run: Watch the robot dominating the track and showcasing its speed and precision here: https://vt.tiktok.com/ZSxj8faqn/
Core Hardware & Actuation
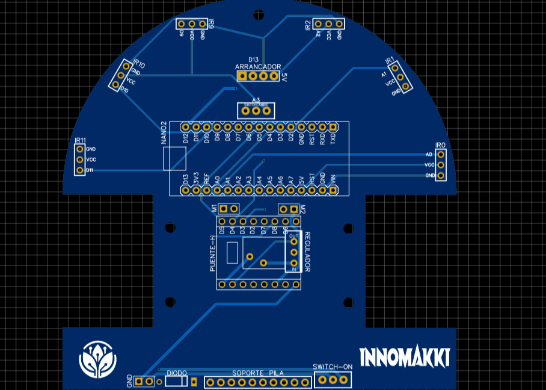
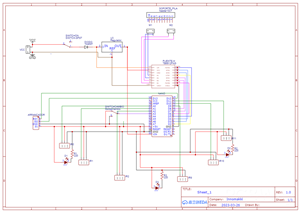
Microcontroller (Arduino Nano): The heart of the board. Chosen for its perfect balance of footprint, GPIO availability, and ease of bare-metal programming, allowing for instantaneous logic execution without heavy library overhead.
Motor Driver (TB6612FNG): We use the TB6612FNG for ultra-fast switching, minimal voltage drop, and high efficiency, ensuring every ounce of battery power goes directly to the wheels.
Actuators (N20 Micro Gearmotors): Power delivery is perfectly optimized to drive standard N20 micro metal gearmotors, providing the ideal power-to-weight ratio for rapid acceleration and aggressive braking.
Start Module Ready: Includes a dedicated header for a start module (Arrancador) to comply with professional competition rules.
Optimized Sensor Topology The board is designed to interface seamlessly with Digital Sharp Distance Sensors, strategically placed to feed pure logical states to the Nano:
Front Sensors (Optimized for 15cm or 10cm): Used for immediate obstacle detection. When triggered, the software executes a "closed turn," aggressively spinning the robot away from the wall.
Side Sensors (Optimized for 10cm or 5cm): Used for parallel tracking. The board reads these inputs to make micro-adjustments via PWM, slightly altering the speed of the N20 motors to hug the wall perfectly, or driving the robot into an "open curve" to seek out a lost wall.
The Software Philosophy & Upgrades
This base hardware version is meant to be run bare-metal with manual code tuning.
The control strategy relies on a dual-side tracking algorithm (independent Left and Right wall-following modes) driven by raw if/else logic.
Developers can manually tune the PWM values for straight driving, wall-corrections, and curves.
Looking for the Premium EEPROM + App Version? If you want to avoid hardcoding variables and calibrate your robot wirelessly on the fly, you can get the advanced code version with EEPROM integration and its companion smartphone App starting at just $3 USD on Ko-fi: https://ko-fi.com/s/4adcfba3ca
Solder your Nano and TB6612FNG, plug in your N20s and Sharp sensors, tune your variables, and dominate the maze.
Robot Maze Robot
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.


















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW



- Comments(0)
- Likes(1)
More by A. Daleth Hernandez Barreto
-
Programmable Mist Maker - XIAO / QT PY Extension
777 1 0 -
RadioHAT - Raspberry Pi radio development platform
622 0 1 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3096 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3713 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4025 2 2





















