





Zeus - Eletronic Speed Controller for Brushless Motors
As the Robot War evolved, new technologies were emerging and one of them was the increased use of brushless motors. Brushless motors are motors with newer technology than traditional brushed DC motors and bring many benefits over brushed motors. Thus, a need arose within the team to have a controller for this type of motor. Hence Zeus was born: the dream of having an Electronic Speed Controller for Brushless Motors.
This type of motor is a much more efficient, compact, complex design, that eliminates the need for a brush, which therefore eliminates a source of heat and inefficiency, however this design implies in a much more complex and difficult to design electronic speed controller.
Zeus is the result of the effort and research of all the team in one single project. Therefore, everything that went wrong with the other DC controllers of the team was taken into account in the design of this controller. As stated before, these motors have a much more complex design, and that is because in contrast with a DC Brushed motor, where, just a voltage differential between its terminals is needed for it to generate torque, in the BLDC motors a correct commutation of its three phases is needed to achieve a constant and continuous torque. This type of complex control becomes a great challenge in the design of this controller.
So, the great objective is to unite the knowledge acquired by the power electronics team with a more complex and robust logic than the one found in the DC motor controllers. The intended use and design for these controllers is to control the motors used on the robot’s weapon motors, where the speed is one-directional and the changes ins speed are way less frequent and abrupt when compared to a drive system where the speed constantly changes speed and direction with the acceleration, deceleration and turning of the robot, this would make it even more difficult to control the motors.
The Controller is in the prototype construction phase and it is expected that it’s first version will provide powerful information and insights to improve the overall reliability and performance to tweak the current to design to achieve the results and performance desired.

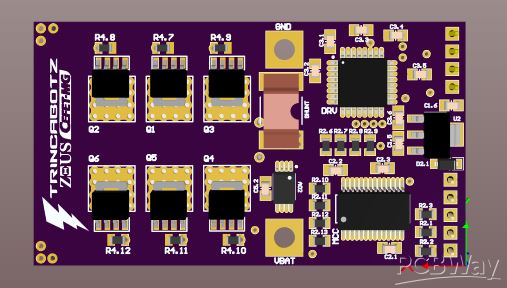
The board was designed to control the Weapon System motor for Hobbyweight robots, more specifically the Orthus robot, and the featherweight robots (13,6kg), more specifically the F-18 robot. In addition, in the future, it will be possible to control the motors of the Drive System using the same hardware by changing only the software. As one of the biggest problems within a robot is space, the Zeus board has very small dimensions for the category, having only 62x35 mm.
The power part, unlike common DC controllers, that have 4 Mosfets, has 6 Mosfets, in a topology known as Three-Phase Inverter Bridge. As the board uses more MOSFETS, and consequently more auxiliary components, the MOSFETS chosen have the smallest topology available for the application, which allowed the board to have a very small overall dimension. In addition, it has TVS diodes and Snubber circuit to protect against voltage spikes in the three phases.
The board was developed to have two configurations: one for a Hobby category and another for the Feather category. In the Hobby configuration, the board should be capable of delivering 55A continuous and up to 135A peak. In the Feather configuration, the board should be able to deliver 80A continuous and up to 180A peak. To drive the Mosfets, a driver with 3 specific half-bridges was used to control this type of motor and a microcontroller makes the bridge between the power part and the control part, interpreting the signals coming from the radio and generating control signals for the driver, allowing it to switch the phases at the most optimized time.

- Comments(0)
- Likes(4)
 More by THSS1999
More by THSS1999
-
 Trincabotz CEFET-MG
ROBOTICS TEAMSeeking improvements in robotics, the teams have as a goal the encouragement of technol...
Trincabotz CEFET-MG
ROBOTICS TEAMSeeking improvements in robotics, the teams have as a goal the encouragement of technol...
-
 Ares - Crontroller For Brushed Motors
With all the competitivity in the robot war increasing every time, all the devices are evolving in t...
Ares - Crontroller For Brushed Motors
With all the competitivity in the robot war increasing every time, all the devices are evolving in t...
-
 Zeus - Eletronic Speed Controller for Brushless Motors
As the Robot War evolved, new technologies were emerging and one of them was the increased use of br...
Zeus - Eletronic Speed Controller for Brushless Motors
As the Robot War evolved, new technologies were emerging and one of them was the increased use of br...











