




BRACU Mongol-Tori
Mongol-Tori
BRAC University's Mars Rover Research & Robotics Team
Contact Info:
Email: mongol-tori@bracu.ac.bd
Phone: +8801783311941
Website: www.bracu-mongoltori.com/
LinkedIn: www.linkedin.com/company/bracu-mongol-tori
Facebook: www.facebook.com/bracumongoltori
Instagram: www.instagram.com/bracumongoltori
2. Executive Summary
Mongol-Tori, a team formed in 2016, has developed into one of Asia's best university Mars rover teams since then, representing the commitment of BRAC University towards engineering innovation, space exploration, and advanced technology. With its firm record of international achievements—including 8th rank globally in URC 2025 and multiple podium positions in international competitions—Mongol-Tori is driving the next wave of rover technology with a focus on autonomous navigation, AI, and sustainability. Innovative partners who share this vision (like VIVO) are encouraged to join this exciting journey in the search for new technology, the development of the youth, and the elevation of Bangladesh’s role in the global stage of robotics.
3. About Mongol-Tori
-Founding & Background: Mongol-Tori, started at BRAC University in 2016 as a student project, is a national aspiration to open the doors of Bangladesh to space and rover technologies. The team creatively designs state-of-the-art rover technology by following a systematic approach of research, development, and direct experimentation.
-Mission: Mongol-Tori’s goal is to fulfil the requirements of the Mars exploration. Like advanced robotics—next-generation, AI-integrated, and autonomous systems developed scientific payloads. That is the goal of Mongol_Tori.
-Vision: Our ultimate goal is to be known globally as the best student-led space robotics team and to drive innovation grounded in the principles of Bangladeshi culture, with engineering leadership that is sustainable.
-Values: We value innovation, teamwork, STEM outreach, sustainability and patriotism.
-Unique Identity: The rover’s design presents a truly unique approach by encapsulating the Nakshi Kantha and Jamdani patterns, symbolizing our commitment to creativity and engineering excellence.Total cost and global benchmark compliance are maintained through the prioritisation of sustainability and the use of recycled materials.
4. Team Structure
Active Members: The team has about 70 active students from a mix of fields, including mechanical, electrical, software, science, design, and business.
Sub-teams and Leadership Roles:
Electronics & Embedded Systems: Handles sensors and control systems.
Software, AI & Autonomy: Focuses on navigation, route planning, and AI-based decisions.
Science Mission: Performs soil analysis and monitors the environment
PR, Design & Communication: Creates content, manages branding, and handles outreach.
Mechanical Engineering: Works on the frame, suspension, and movement of the rover.
Advisors: Dr. Md Khalilur Rhaman
5. Rover Overview
Hypersonic – URC 2025 Mars Rover
Design Goals: To create a versatile, high-performance rover capable of completing complex tasks autonomously under rigorous Mars-like conditions.
Key Features:
The Mechanical System:
(a)The Chassis: The rover's chassis is built on a highly effective rocker-bogie suspension system, which helps it navigate rough terrain. This system, combined with an advanced arched base, enables the rover to distribute its weight evenly and remain stable on steep slopes or rocky surfaces. The chassis is also segmented, allowing for easy assembly and disassembly depending on the mission. For easier maintenance and troubleshooting, it includes a flipping mechanism that separates the control and electronics systems. The chassis has been cut in several areas to reduce weight to meet the URC limit of 50kg, giving the rover more mobility. As a unique touch, the rover's aluminium panels feature a CNC-machined design inspired by Bengali Jamdani patterns, which helps reduce weight while keeping the structure strong. The wheels themselves are rigid and are used to grab the terrain and pivot to move the rover forward. These wheels are connected by a V-shaped or curved frame that provides extra leverage and increased ground clearance. The suspension system is designed so that when a front wheel moves up, the rear wheel does not move forward with it. This is managed by a linkage and pivot system that allows the rear wheels to move independently, ensuring that the rover's mass is always evenly spread to prevent imbalances and improve stability on slopes.
(b)The Manipulator Arm: The Hypersonic rover is equipped with a six-degrees-of-freedom robotic arm, designed to help the operator complete all tasks with precision. The arm and the excavator claw are both able to rotate. The arm can bend up and down and rotate on its base. It can reach up to 1.4 meters and has a 120° rotational base, giving it a wide 3D workspace. For the Science Mission, the team can swap out the standard gripper for an excavator claw. An additional 3D-printed adaptive gripper is also included to provide a stronger, more secure hold. For the Equipment Servicing Mission, a special 2-DOF keyboard-typing arm can be clipped on. This mini-arm extends on its own to a set position and then uses a fixed camera and vision algorithms to locate and type on the keyboard with precision. Since the keys' locations are fixed, the system can use inverse kinematics to calculate and perform the exact movements needed for autonomous typing.
The Electronics:
The rover gets its power from three hot-swappable 18V 9Ah lithium-ion batteries. These can be replaced without shutting down the rover, and each one powers a different part of the system—like the controls, communications, and other devices—for extra reliability. The rover's wheels are controlled by a dual-channel Cytron MDDS60 motor driver, which can take up to 60 amps of current, while the arm and keyboard manipulator are managed by four dual-channel 10A Cytron MDDS10 drivers, which can take up to 10 amps. One of these channels is kept as a backup. The Cytron motor drivers are stacked to create a more compact control system, and an onboard power monitor makes it easy to debug each channel individually. The rover is designed to run for an estimated 90 minutes. During this time, the Pixhawk sends Pulse-Width Modulation (PWM) signals to the motor drivers. A PWM signal is a square wave where the pulse width determines the average voltage. The motor driver then amplifies this low-current PWM signal into a high-current power signal to control the speed and direction of the motors. Different motors are connected to separate channels, allowing them to run simultaneously, such as the wheels and the arm. Status LEDs are controlled by a Pixhawk, and the vision and communication modules run on separate voltage supplies. An onboard HP Mini PC is also used and requires 19.5V to operate. A Power Distribution Board (PDB) ensures a stable power flow to all components, and a red-labelled physical kill switch offers a critical safety measure.
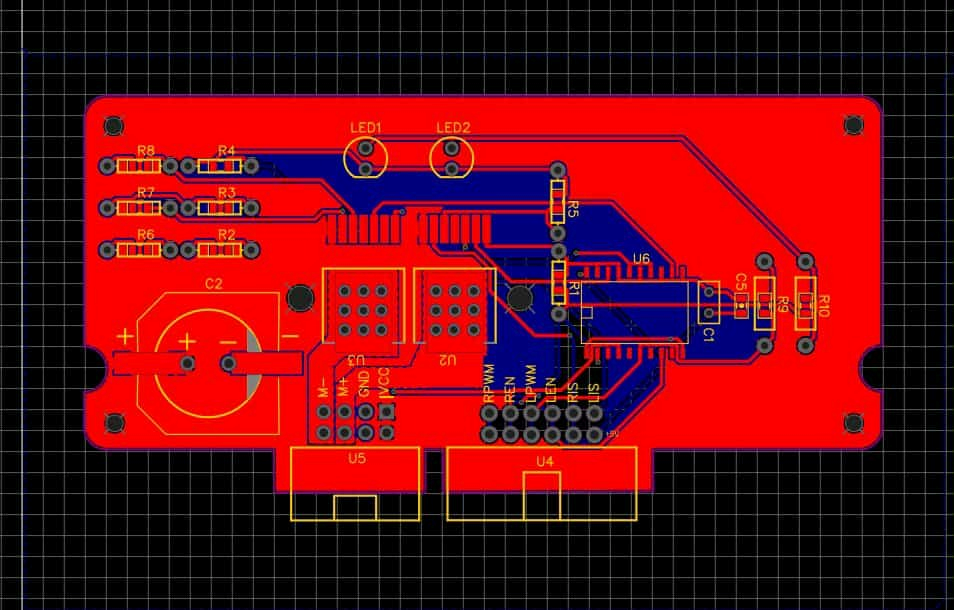
The MT Driver is a newly developed, plug-and-play motor driver built around the powerful BTS7960 ICs. With two BTS7960 chips working in parallel, it delivers high efficiency, reliability, and the ability to handle heavy current loads with ease.
Unlike conventional motor drivers that require tangled wiring and complex setups, the MT Driver features a modular plug-and-play design. It can be swapped instantly, replaced without soldering, and integrated directly into your system with no wiring hassle.
Specifications:
Operating Voltage: 6V – 27V DC
Continuous Current: up to 43A per channel
Peak Current: up to 80A (short pulses)
Control Interface: PWM / Logic pins
Cooling: PCB copper pour + heatsink pads
Why MT Driver is Different:
Simplified integration – no wiring mess, clean connector-based design.
Quick replacement – works as a drop-in module, reducing downtime.
Stronger design – dual BTS7960 ICs ensure stability under heavy load.
User-friendly – onboard connectors and LED indicators make setup and monitoring effortless.
The MT Driver brings a new standard in motor control for robotics, automation, and high-power DC motor applications—making it the ideal solution for both hobbyists and professionals who want power, simplicity, and reliability in one module.
The Software:
The rover's brain is built on the Robot Operating System 2 (ROS2) Humble framework, which handles both remote control and autonomous navigation. The rover's different systems talk to each other using mission-specific ROS packages and the MAVLink protocol, which guarantees that data is sent without any loss or interruption. To get an accurate location regardless of weather, like cloud cover, the rover uses a combination of Global Navigation Satellite System (GNSS) modules. To prevent the magnetometer from drifting during a mission, it uses a mix of industrial-grade Inertial Navigation Systems (INS), which can be swapped in if a drift is detected. A custom-built Graphical User Interface (GUI) gives operators a real-time view of the rover's status and environment. For autonomous navigation, the user can simply enter GNSS coordinates, and the rover will select a detection method to complete the task. The science GUI allows users to visually inspect the data from the science module, including tools for detecting potential signs of life.
Network and Vision:
The rover's communication system is built for reliability and redundancy, using a point-to-point connection with the ability to "frequency hop" and balance its network load. The data can only be accessed by the rover and the base station. It talks to the base station using two network systems: a 5.7GHz point-to-point network and a 900MHz point-to-point network system. On the rover, a Ubiquiti airMAX AC Lite router is connected to a 13dBi omnidirectional antenna. On the base station, a sector antenna is connected to a similar router, which in turn is connected to a PC. The connection between the PC and the rover's router is established using an SSH (Secure Shell Host) connection, providing a reliable link for sending commands, receiving telemetry, and viewing live video feeds. A P900 radio modem is used for telemetry, which takes raw serial data and wirelessly transmits it to a receiver telemetry unit in a Pixhawk flight controller. This telemetry is also connected to a controller and a PC for direct wireless control. The main control system of the rover does not require a computer to operate, only a microcontroller. The base station PC is primarily used for the camera feed, autonomous navigation, and sensor data processing. For vision, the rover uses a USB camera, a repurposed car rear camera to gather DVR data, and an analogue-free system, all of which provide a 5.8 GHz RTSP stream.
The Autonomous System:
For the Autonomous Mission, the rover relies on a high-end Inertial Navigation System (INS), the SBG Ellipse-D, which uses dual-antenna Differential GNSS (DGNSS) and Real-Time Kinematics (RTK) for remarkable accuracy. This gives it centimetre-level positioning and a heading precision of 0.2 degrees. A secondary, industrial-grade Inertial Measurement Unit (IMU), the Witmotion HWT905, and the YOB (orientation) motion sensor are used to provide essential orientation data and act as a compass, ensuring the heading is accurate to within 1 degree in a static magnetic field. This dual system helps the rover calculate its target and align itself. The autonomous system runs on vision, GPS, and algorithms, and once given a command, the rover executes it without human interaction and provides correction data. The rover uses two ZED 2i stereo cameras for depth mapping and to find objects of interest. For object recognition, it uses YOLO11 and YOLOv8-world models, which were trained on a custom dataset of mallets and bottles.
The Mission Plan:
(a)The Delivery Mission: The rover is designed to find and pick up objects, read signs, and deliver samples. Based on last year's experience, the team removed the slow linear actuator-based omni-wheel mechanism. This change has made the rover more stable and better at following marked paths. Its 12-inch slotted wheels allow it to easily travel over sandy terrain. The 3D-printed adaptive gripper can pick up tools, rocks, and heavy objects over 5 kg. The arm's base rotation allows it to store samples in the rover's cache box. Onboard cameras stream video via a 5GHz network, and there's a backup digital FPV transmitter that can be raised if the main network fails. A redundant control system with a Pixhawk can take over in case of a power failure, ensuring the rover can complete its mission without needing a battery change.
(b)The Equipment Servicing Mission: The rover's manipulator arm has been adapted to perform precise maintenance tasks on a mock lander. A dedicated servo-based mini-arm on a motorised rail is used for autonomous keyboard typing. Three of the eight onboard cameras are placed on the arm with a laser crosshair to help with precision tasks like picking and placing caches, inserting USB drives, and manipulating switches. The arm's base rotation allows it to operate a joystick, and a bevel gear is used to turn knobs. The rover has completed multiple mock tests, proving its ability to perform these tasks.
(c)The Autonomous Mission: The rover's autonomous navigation system uses a custom decision tree that takes GNSS coordinates as a destination. The system uses a new path-planning algorithm that analyses the terrain's elevation from a point cloud map to find the shortest route. It navigates dynamically, avoiding obstacles as it goes. When searching for ArUco posts, the system stitches together frames from two ZED 2i stereo cameras to create a super-wide 200-degree field of view. If it can't find a marker right away, the rover starts a "square spiral" search pattern. During autonomous travel, a red light is turned on, and a green light flashes when it reaches a destination. The rover’s object detection models were trained on over 6,330 images to ensure high accuracy and speed. All of this can be monitored from the base station using a web-based GUI that shows the rover's real-time position and camera feed on an offline map.
Testing and Evaluation: The team follows a detailed testing plan to make sure the rover works perfectly.
Sub-System Testing: From September 2024 to February 2025, individual components are tested. This includes using CAD designs for the mechanical structures, as well as testing the network, cameras, and electrical systems.
Complete System Testing: After the subsystems are ready, the full rover is assembled in January 2025 for integration tests. This phase focuses on making sure all the parts work together smoothly.
Operational Testing: From January to May 2025, the team runs mock tests that simulate the actual competition conditions. These tests are designed to ensure the rover can perform all its essential tasks, from collecting soil samples to manipulating switches.
Science Mission:
To look for signs of life in soil samples, the rover performs several onboard experiments. It can use an excavator claw to collect samples from up to 15 cm deep, funnelling the soil into separate test tubes to avoid contamination. It checks for carbohydrates using a Molisch's reagent test, which shows a purple ring in the presence of carbohydrates. It also uses a Ninhydrin test to detect proteins by turning the solution purple when heated. The results of both tests are read by a colour sensor. For further analysis, the rover uses a UV-C sensor to mathematically analyse the presence of proteins and carbohydrates. The rover's science box also contains a variety of sensors for environmental analysis, including pH sensors, moisture sensors, oxygen sensors, NPK sensors, humidity sensors, carbon dioxide sensors, and nitrogen sensors.
Technical Integration: Hypersonic uses cutting-edge AI and autonomy to support missions like Extreme Retrieval and Delivery, Astronaut Assistance, and Scientific Analysis challenges.
Cultural Design: Incorporates Nakshi Kantha and Jamdani motifs, showcasing the fusion of technology and national heritage.
Sustainability: Uses repurposed materials and sustainable design philosophies to minimise waste and cost without compromising quality.
6. Competition Achievements
University Rover Challenge (URC):
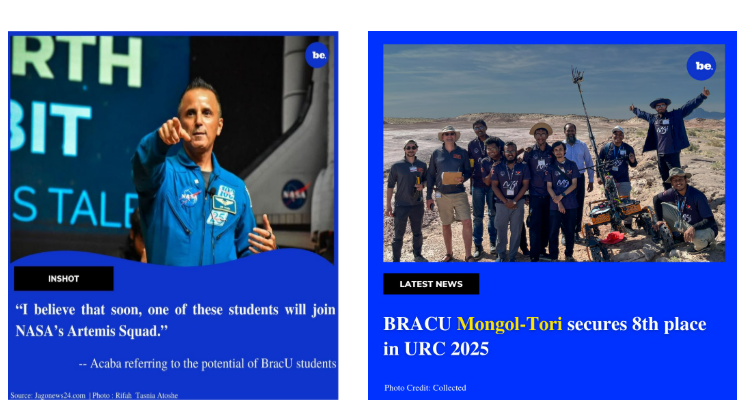
-8th position globally in 2025
-2nd place among Asian teams in 2023
-4th place globally in 2021
-13th place out of 95 teams globally in 2018 (competing against top universities including Toronto, California State and Michigan)
International Rover Challenge (IRC):
-7th place in 2020
-2nd Runner-up in 2018, also received merit appreciation
National Competitions:
-1st place in AUST Rover Challenge 2022
-Third place in Digital World ICT Expo 2017-18
Awards & Recognitions:
-Space Innovation Summit Award, 2018
-National ICT Awards in Student Category, 2018
-NASA Space Apps Challenge, 2nd Runner-up, 2018

7. Innovation & Research Highlights
The team prioritizes sustainability by repurposing materials to reduce expenses while still meeting international standards.
8. Community Outreach & STEM Advocacy
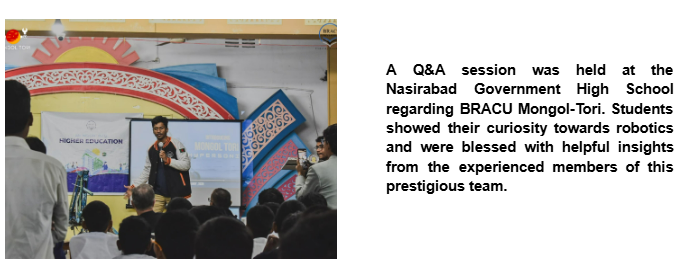
Mongol-Tori actively promotes STEM education in the country through workshops, seminars, and field trips to laboratories, motivating young minds with diverse backgrounds. Outreach has been conducted in the best schools and colleges, including Scholastica, Sunnydale, Chattogram Cantonment Public College, Presidency School, Ispahani Public School and College, Viqarunnisa Noon School and College, and Adamjee Cantonment College. Students who have been actively involved in learning about robotics design and sustainable engineering practices have provided ideas and feedback during these programs. Such outreach activities create interest and develop talents in the emerging technology of Bangladesh.


9.Collaboration with the Industry

The team showcased our rover to Bangladesh Navy officials, demonstrating precise autonomous control, sub-centimeter accuracy and long-range connectivity in GPS-denied terrains, with support from SBG Systems and SATEL. Such sessions help us explore real-world defense applications beyond competitions and advancing one step closer to industry collaboration.

BRACU Mongol Tori actively participated in the BEAR Summit and the National Semiconductor Symposium, showcasing their innovations and contributions in space and semiconductor technologies.
10.Media Partners


11.Media Exposure


12. Current Sponsors & Partners
- Comments(0)
- Likes(0)













