STM32H743ZIT6 High-Performance Flight Computer & IMU Development Board for Aerospace Applications
STM32H743ZIT6 High-Performance Flight Computer & IMU Development Board
Project Overview
This project is a compact, high-performance embedded development and flight computer board built around the STM32H743ZIT6- one of ST Microelectronics' most powerful ARM Cortex-M7 microcontrollers running at up to 480 MHz with 1MB RAM and 2MB Flash. The board is inspired by the ST NUCLEO-H743ZI reference design (document MB1364) and extends it with onboard aerospace-grade inertial sensors, barometric altitude sensing, USB-C connectivity, SD-Card For Data Storage, and a rich set of I/O expansion headers- making it ideal for rocketry flight computers, drone autopilots, robotics, and high-speed data acquisition systems.
Need To Build This
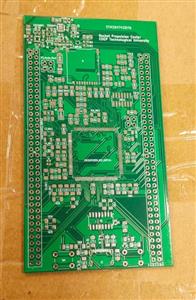
Off-the-shelf development boards like the NUCLEO-H743ZI are great for prototyping but lack integrated sensors needed for real-world flight applications. As a member of a rocketry team, We needed a single board that could Handle high-speed 6-axis + 6-axis IMU fusion for attitude estimation, Log barometric altitude and pressure in real time, Communicate via USB-C without needing an FTDI dongle, Fit within the tight form factor of a rocket avionics bay (60mm wide), Be hand-solderable with 1206 passive components for field repair. Instead of stacking shields and wiring sensors on a breadboard, I designed everything onto one 4-layer PCB- clean, compact, and flight-ready.
Key Features
- STM32H743ZIT6(480 MHz Cortex-M7)
- Dual IMU (ICM-20649 + ICM-42688-P) for redundant sensor fusion
- BMP390 barometric altitude sensor
- Native USB-C with CH340C bridge + ESD protection
- In-built MicroSD slot for high-speed flight data logging
- Dual 3.3V LDO power rails with clean analog supply
- 25 MHz + 32.768 kHz dual crystal clocking
- 4-layer stackup for clean power planes and signal integrity
- Hand-solderable 1206 passive components
- SWD debug header
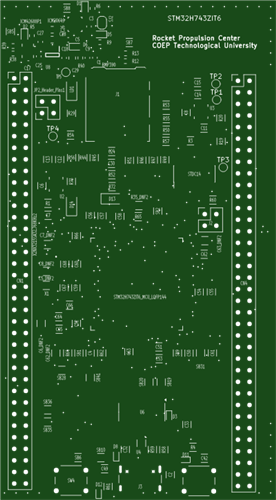
- 72× expansion I/O via dual 36×2 headers
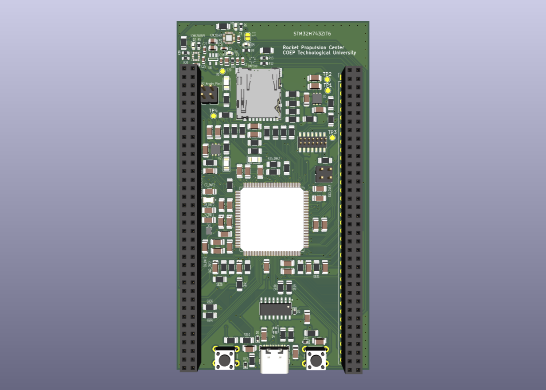
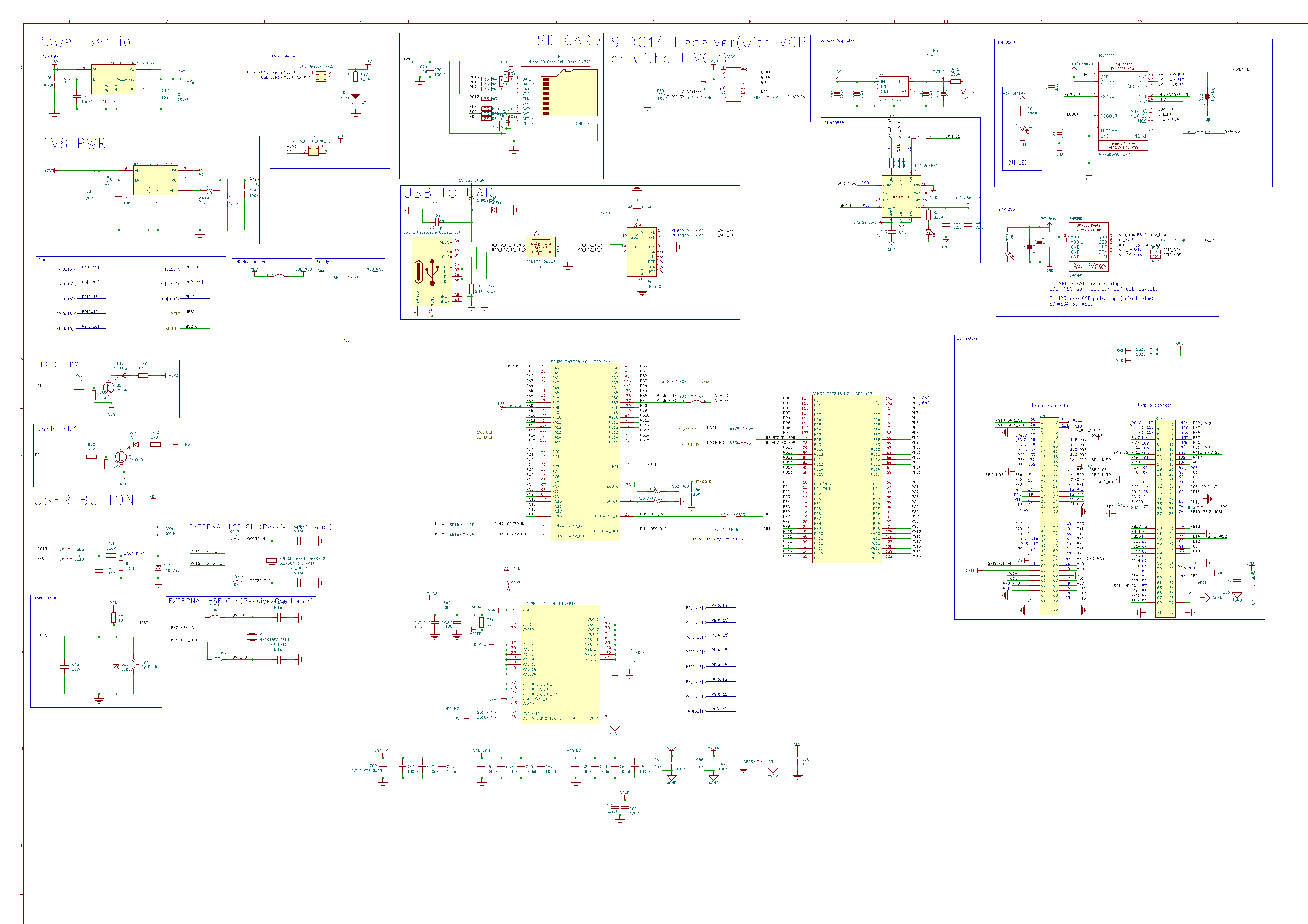
System Architecture
Core Microcontroller - STM32H743ZIT6 (LQFP-144)
- Cortex-M7 core 480 MHz with FPU & DSP instructions
- Dual AXI/AHB buses for parallel sensor + USB operation
- Hardware SPI, I2C, UART, USB FS/HS, SDMMC, and more
- 144 GPIO pins routed to dual 36×2 pin expansion headers
BMP390
- Pressure measurement 300–1250 hPa
- Altitude resolution: ±0.05m
- Connected via SPI for high-speed altitude logging during ascent/descent
ICM-20649 - High-G Sensor
- ±30g accelerometer, ±4000°/s gyroscope
ICM-42688-P - Precision Sensor
- ±16g, ultra-low noise (70μg/√Hz)
- Run simultaneously on separate SPI buses
- Cross-validate each other
- No data loss across any flight phase
- One handles shock, one handles precision
USB-C Interface — CH340C + ECMF02 ESD Protection
- USB-C receptacle for programming and serial communication
- CH340C USB-to-UART bridge for easy PC connectivity- no external programmer needed
- Integrated USB ESD protection filter for robustness
- 33Ω series resistors on USB D+/D− lines for USB 2.0 compliance
- 5.1kΩ CC resistors for USB-C power negotiation
- Solder bridge SB array for flexible signal routing
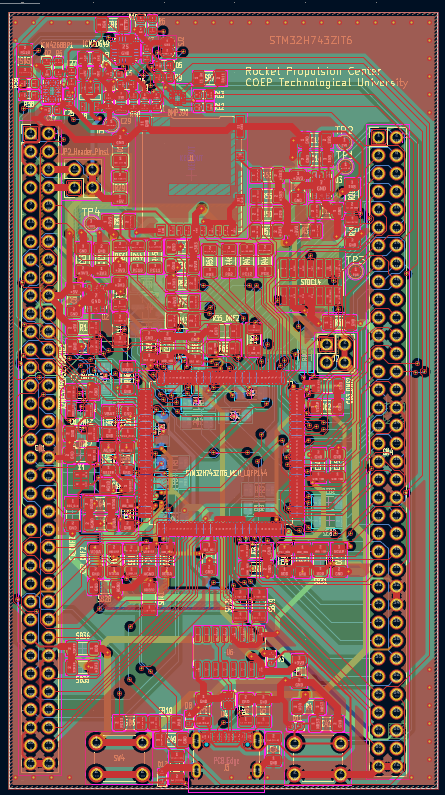
PCB Design Considerations
Stackup
- 4-layer: Signal / GND / PWR / Signal
- Solid GND plane under critical signals
- Split analog and digital power plane
Signal Integrity
- USB D+/D− length matched using Differential signal routing
- No 90° bends, short crystal traces
Power Integrity
- 100nF + 10µF decoupling at every VDD pin
Thermal Management & Placement
- Decoupling caps next to IC pins
EMI / ESD
- ESD protection on USB
- GND stitching vias on board perimeter
- No floating copper pours
- Minimum trace width 0.15mm
- DNF components clearly marked
Testability
- Test points on critical nets
- SWD + UART headers accessible
Conclusion and Future Scope
This project demonstrates a compact 4-layer flight computer built around the STM32H743ZIT6, combining dual IMU sensor fusion, barometric altitude sensing via BMP 390, USB-C connectivity, and MicroSD logging. The dual ICM-20649 and ICM-42688-P architecture ensures uninterrupted data capture across all flight phases, from 30g launch shock to precise navigation, making it a reliable foundation for Aerospace Applications.
Future development will focus on adding GPS and LoRa telemetry.
STM32H743ZIT6 High-Performance Flight Computer & IMU Development Board for Aerospace Applications
*PCBWay community is a sharing platform. We are not responsible for any design issues and parameter issues (board thickness, surface finish, etc.) you choose.















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW




- Comments(5)
- Likes(1)
- 2 USER VOTES
- YOUR VOTE 0.00 0.00

-
10design
-
10usability
-
10creativity
-
10content
-
10design
-
10usability
-
10creativity
-
10content
More by BOOM 93#
-
Programmable Mist Maker - XIAO / QT PY Extension
51 0 0 -
-
Bluetooth Speaker with Custom designed 15W dual channel Audio Amplifier
54 0 1 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
2706 0 5 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3200 3 8