





|
KiCad 9.0 |
|

|
Processing |
6-axis IMU sensor fusion using ICM-42670-P
You can refer to this blog post for more details: https://y-cyc-esc.com/embedded-systems-examples/2026/02/15/Sensor-fusion-example-for-6-axis-IMU.html
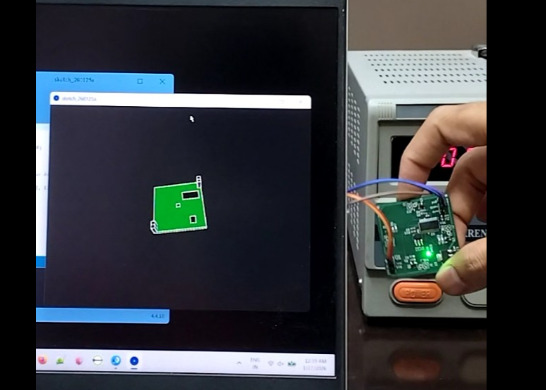
This project implements sensor fusion for orientation estimation using a 6 axis IMU. A supporting animation is developed in Processing software to visualize the orientation estimate.
HARDWARE
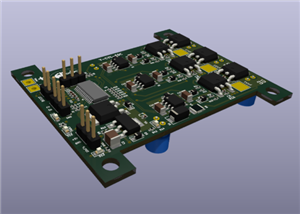
The microcontroller used is Infineon XMC1302 series MCU with 16KB flash and 16 KB ram. The IMU sensor is ICM-42670-P. The module should be powered by an external power supply and a 3.3V regulator on the PCB powers the MCU and sensor.
MCU and IMU sensor communicate through I2C bus. The communication between MCU and PC is done through UART.
PCB is 2 layer and components are all on TOP layer only.
SOFTWARE
We implement the well known Mahony filter for orientation estimation. The algorithm runs at 500 Hz which is triggered by a timer interrupt.
The XMC1302 series MCU does not have any floating-point-unit (FPU) so algorithms are implemented using integer arithmetic only.
Animation to visualize orientation estimate is developed with Processing software.
6-axis IMU sensor fusion using ICM-42670-P
Project images are for reference only. Actual production is based on the manufacturing files on the project page.
Please review the designer's notes (e.g., PCB thickness) and select the appropriate options.
PCBWay is not responsible
for issues caused by unsuitable parameter selections.
For more important ordering information, please refer to
Read More


















Raspberry Pi 5 7 Inch Touch Screen IPS 1024x600 HD LCD HDMI-compatible Display for RPI 4B 3B+ OPI 5 AIDA64 PC Secondary Screen(Without Speaker)
BUY NOW



- Comments(0)
- Likes(0)
More by yoga cycles ESC
-
Programmable Mist Maker - XIAO / QT PY Extension
998 2 1 -
RadioHAT - Raspberry Pi radio development platform
804 0 2 -
-
-
-
-
ARPS-2 – Arduino-Compatible Robot Project Shield for Arduino UNO
3261 0 6 -
A Compact Charging Breakout Board For Waveshare ESP32-C3
3881 3 8 -
AI-driven LoRa & LLM-enabled Kiosk & Food Delivery System
4256 2 2





















