




robot following line
DESCRIPTION
Hi, I'm a student.We will do this as a mechatronic lesson for our school.
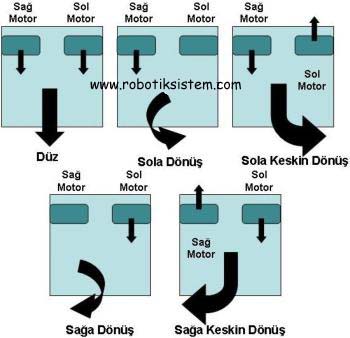
Project presentation: 2 information from the sensor will be read and transmitted to arduino, the arduino will process it and power it according to the engine.
TECHNICAL DETAILS
Input Units:
Input units consist of elements used to separate the black line on a white background or a white line on a black background. CNY70 contrast sensors are the most commonly used sensors in line monitoring robots.
The CNY70 contrast sensor produces analog signals. For the processing of analog signals in the microcontroller, these signals are converted to digital signals using the 74HC14 schmitt voltage converter. When the CNY70 contrast sensor detects black color, the analog signal value is 0 V. This analog signal is sent to the microcontroller by converting it to the logic 0 with the 74HC14 schmitt torque converter. When the CNY70 contrast sensor detects the white color, the analog signal value is 5 V, and the 74HC14 schmitt converter converts this value to logic 1 and sends it to the microcontroller.
- Comments(0)
- Likes(2)












