




Diploma Project “Package Pickup Drone”
With our drone, we aim to significantly simplify and automate the package collection and preparation process. Instead of relying on complex logistics or manual coordination, we combine reliable software with advanced drone hardware to create a seamless user experience.
Through the mobile app we are developing, each shipment is assigned an individual ArUco code that functions as a unique identifier for the package. The user simply attaches this code to the parcel and places it in an accessible location, such as a driveway, garden, or pickup zone. Once the package is ready, the app transmits the exact GPS coordinates to our system. From there, the drone autonomously navigates to the location, locates the package by reading the ArUco code, and securely collects it.
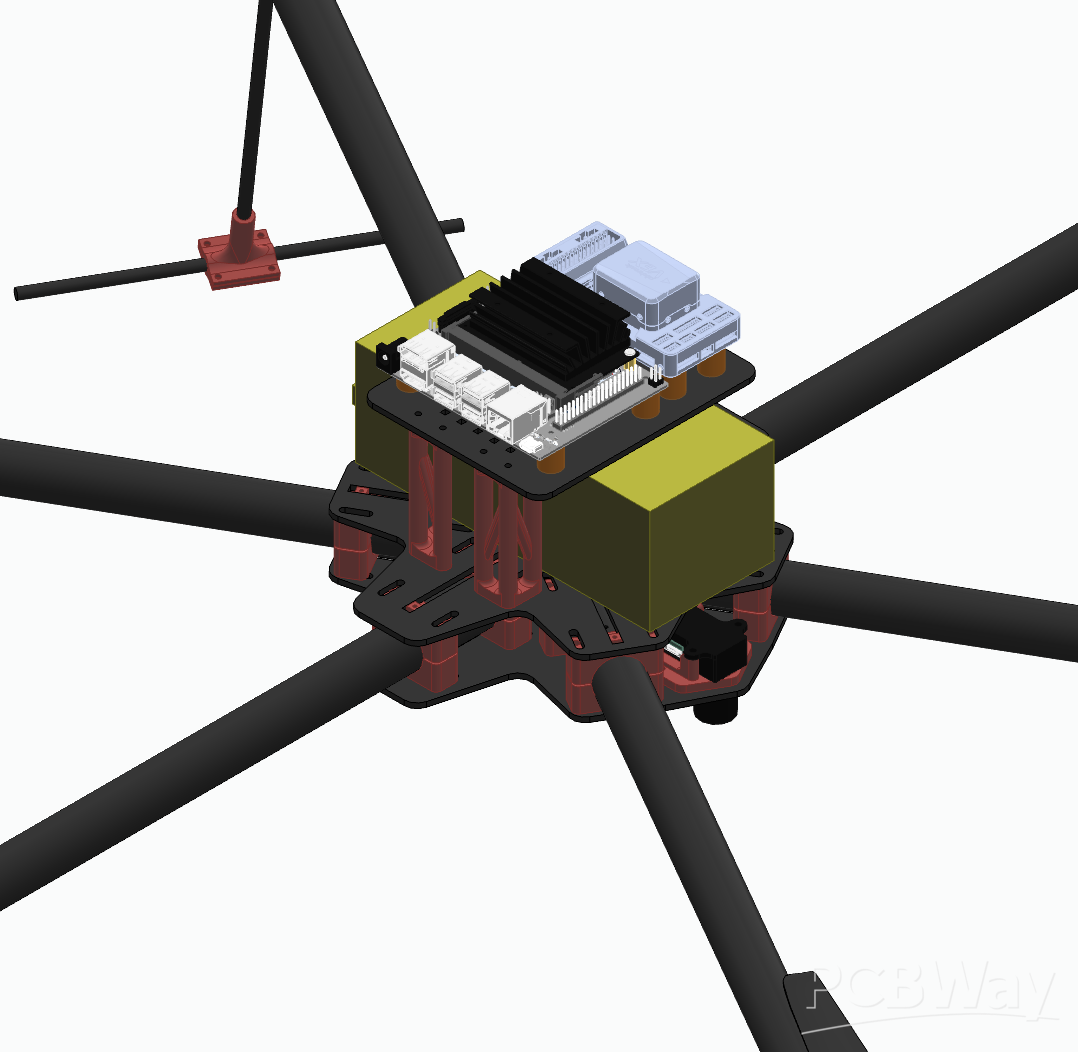
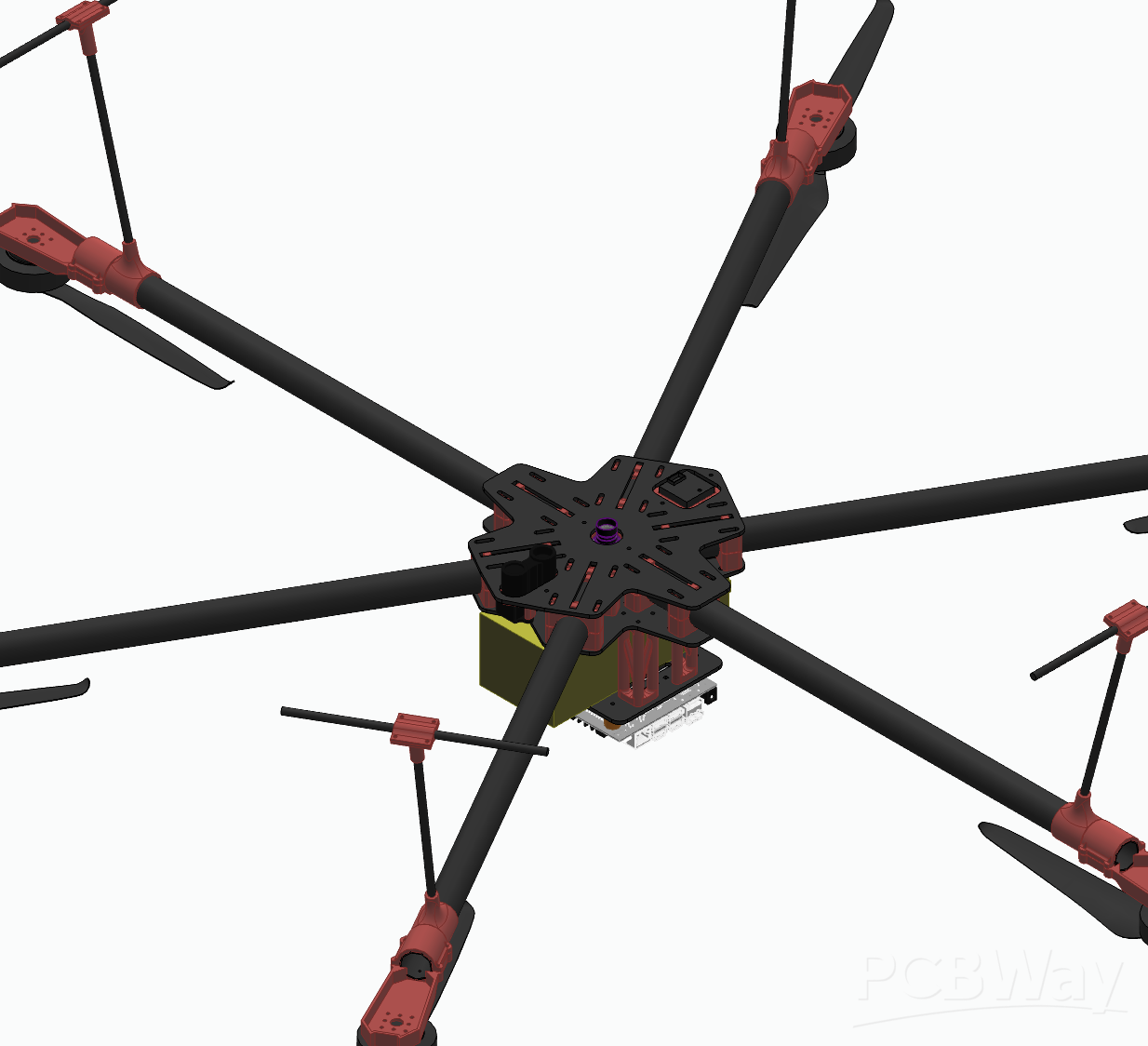
The drone itself is equipped with high-performance components that ensure stable, reliable, and efficient operation. At its core, it uses the NVIDIA Jetson Orin Nano for processing flight data and handling communication with the app and base station. Flight control is managed by the CUAV Pixhawk V6X, a proven and robust autopilot system that delivers precise navigation and safe flight behavior. To provide the necessary lift and efficiency, the drone operates with Tarot 5008 340kv motors, which are designed for high thrust output and energy efficiency—ideal for carrying payloads consistently over multiple missions.
After collection, the package is transported directly to a base station, where it is temporarily stored. The base station serves as a central hub, preparing the parcel for the next step in the shipping process whether that is local distribution, integration into a larger logistics network, or long-distance transport.
By combining user-friendly software with robust flight hardware, our system minimizes human effort, streamlines logistics, and offers a scalable solution for automated package handling.

- Comments(0)
- Likes(0)












