WEMARS - Generation 3 Rover
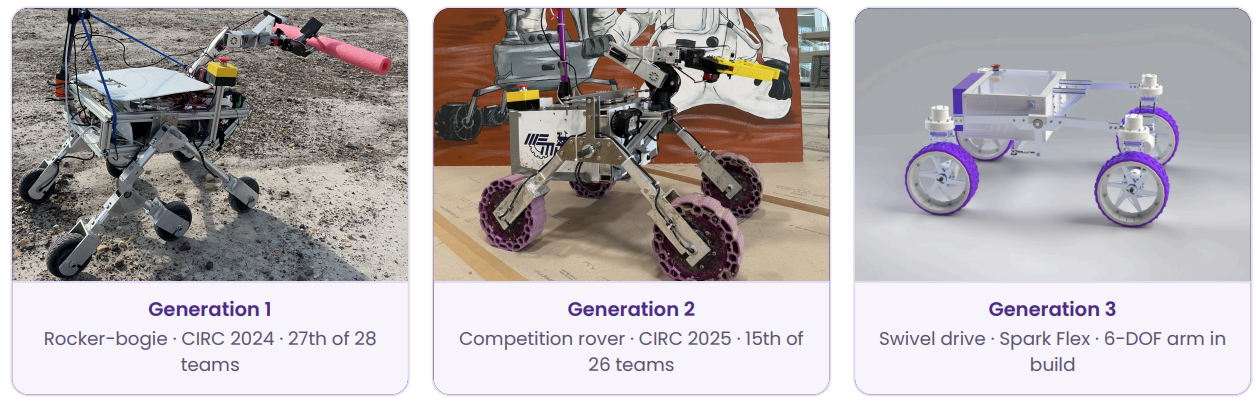
We are WEMARS, a rover club at the University of Western Ontario. We have a long history, and honestly, not all of it is great. Back in 2018, our club competed at CIRC (Canadian International Rover Challenge) for the first time. Shortly afterward, however, the club's members declined and faded, especially during COVID, with a low of approximately 5-10 members total. Since then, we have thankfully made a comeback due to the passion and drive of engineering students. It hasn't been easy, though. We went back to CIRC for the first time in 2023 with hopes and dreams, and a shopping cart of a rover. Unsurprisingly, we placed 27th/28th, but it wasn't a worthless experience, far from that. We learned so much at the competition and used that knowledge to create our next rover, which managed to snag us 15th/26th. Once again, we learned a TON and are coming back once again to make a rover that we believe will get us onto an even playing field with the top schools.
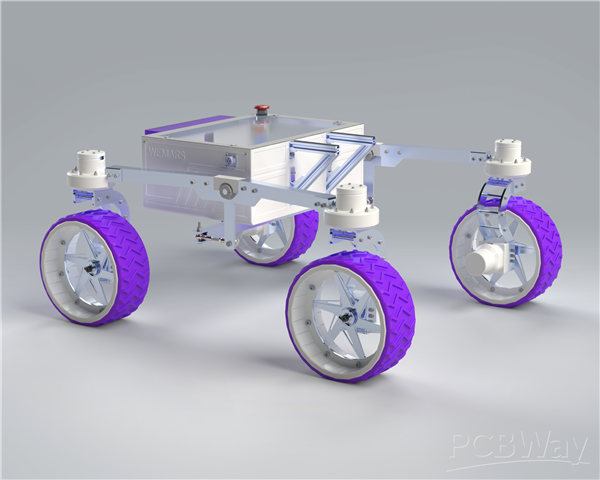
We have spent the past year ideating and working on our new design to ensure it is perfect, and we are proud to present our third-generation rover. This work was led by students who have been a part of the Western Engineering Mobile Advanced Robotics Society (WEMARS) for over three years.
MECHANICAL:
CHASSIS:
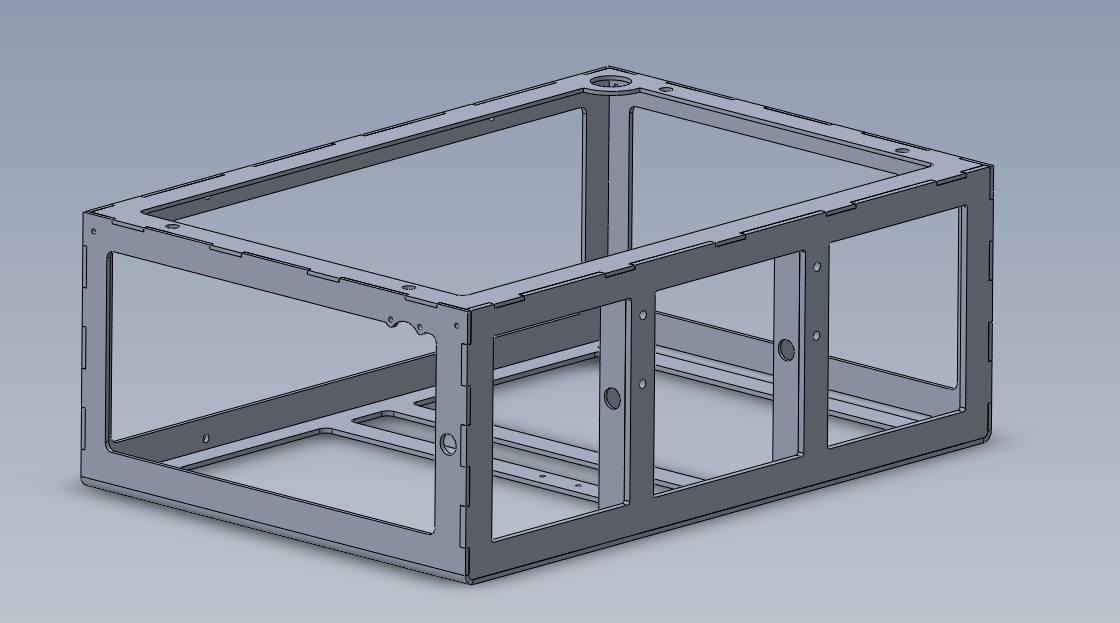
First and foremost, our rover has a brand-new chassis optimized for assembly and light weight, saving a total of 1.3kg from the previous version. In the past, we've absolutely struggled to put the rover together cleanly, so when designing, all of this was taken into consideration.
It's been designed so that all parts can be either laser-cut sheet metal, or bent and laser-cut.
It is composed of four parts: the tube section (which is sheet metal with flanges on each side and laser-cut pocketing), the top panel, the back panel, and the front panel, which are all laser-cut. The chassis utilizes a tab-and-slot design to ensure welding it is a breeze for our university's machine shop!
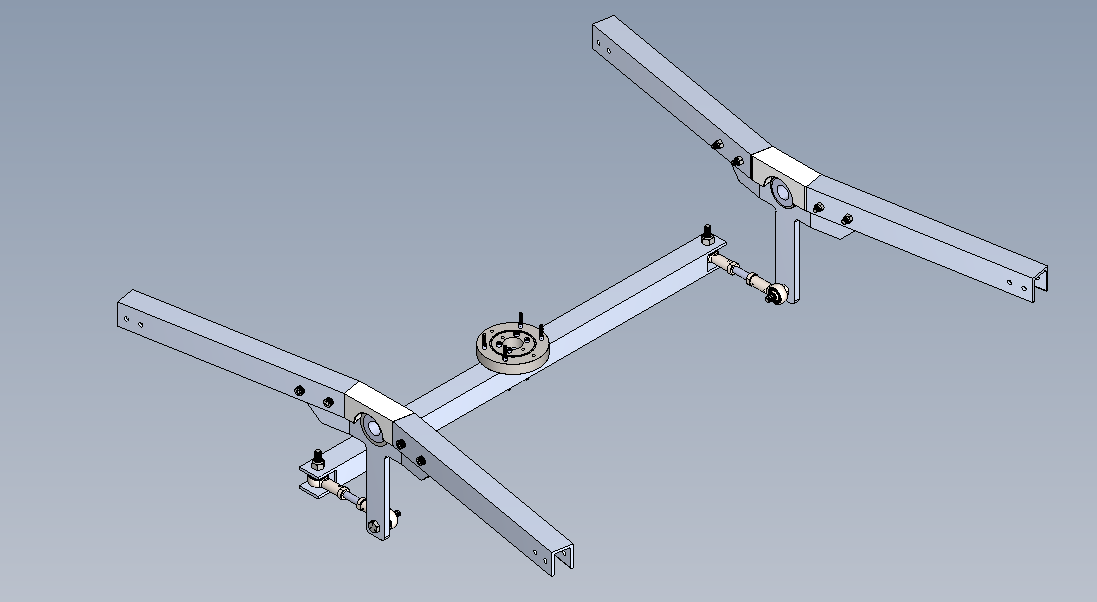
ROCKER AND DIFFERENTIAL:
This is the suspension system of our rover. The cross-roller bearing, which attaches to the long bar, is bolted directly to our chassis. When the wheels on one side start tilting over uneven terrain, it shifts the bar on that side in one direction and forces the bar on the opposite side to move in the reverse direction. This balancing motion ensures all four wheels maintain contact with the ground at the same time. The hub plate requires CNC machining, while the rest of the assembly uses standard hardware, making this a highly manufacturable design.
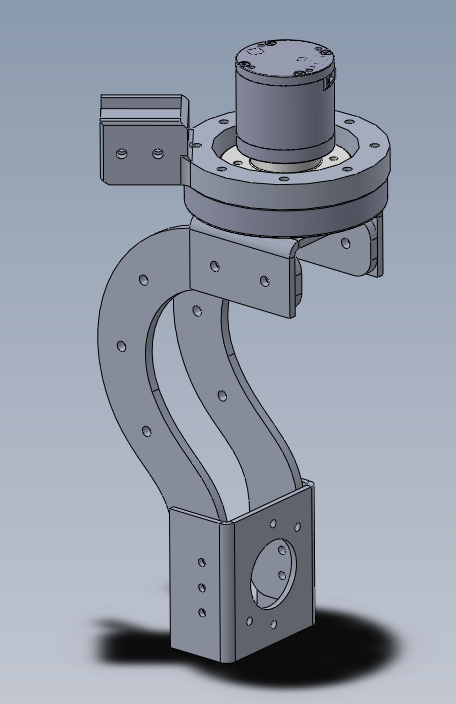
SWIVEL:
All of our past rovers have used strictly 4 or 6 drive wheels, but this new rover brings with it a swerve drive. Swerve-drive rovers allow for much better maneuverability out in the field, and we are super excited to give this popular design a shot.
To enable the swivel, we've made use of a cross-roller bearing and Robstride EduLite 05 motors. We designed the assembly to be as clean as possible: a CNC-machined flange ring connects to the outer race of the bearing and provides an easy attachment point to the rocker tubes. Meanwhile, the motor uses an adapter to connect to the bearing's inner race on one side, and a laser-cut, bent sheet metal U-channel on the other, with bolts going right through the entire stack.
On the bottom side of the bearing, two laser-cut swivel brackets attach to each side of the U-channel. This specific setup allows us to transfer torque and rotation while letting the cross-roller bearing absorb the axial forces. Finally, a front sheet with two side flanges acts as the mounting point for the wheel motor.
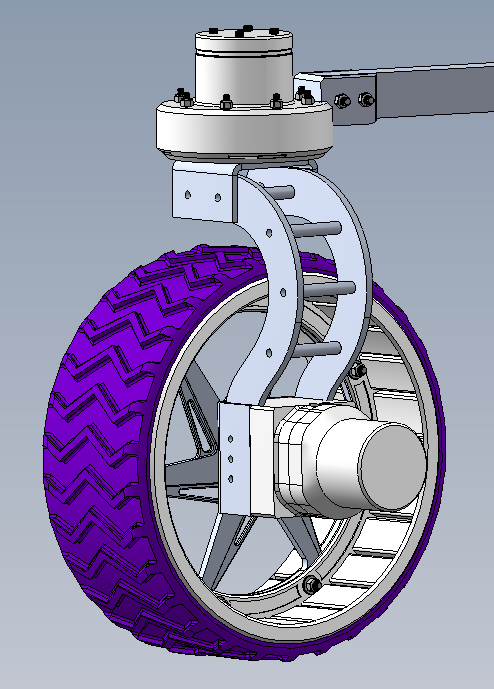
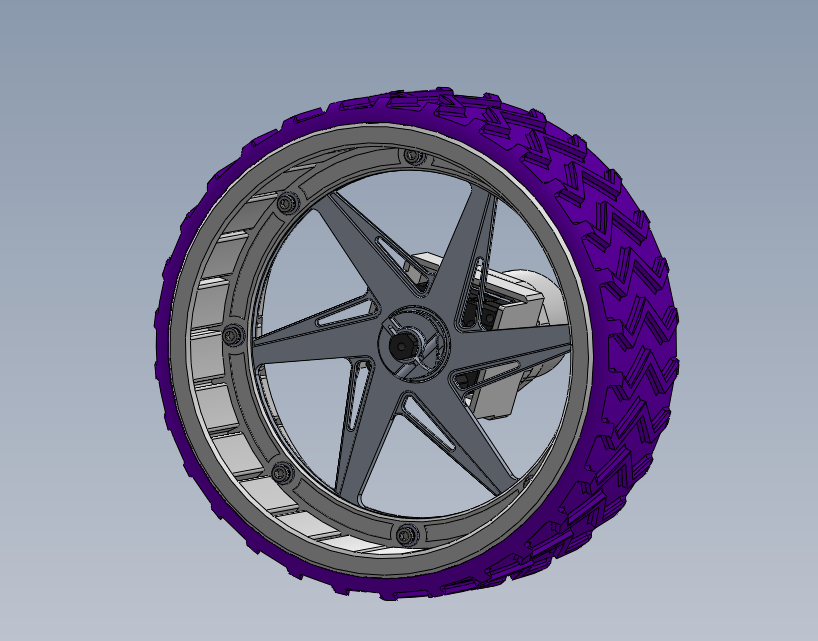
WHEELS:
For the past two rovers, we have made use of wheel hub motors. While they were easy to use because they were wheels themselves (you can see them on our Gen 1 rover), we are more than happy to be switching away from them. Not only does our new design weigh a lot less, but it also just looks cooler. We use an aluminum wheel hub that has a hex cutout for the motor to drive it directly, and two 3D-printed nylon cores that sandwich the aluminum hub and the TPU tread.
We are also currently working on a 6-DOF robotic arm, although that is in progress and not in a showable state yet. We are custom-making cycloidal gearboxes to achieve a very high gearbox reduction to ensure we can pick up 5-10kg payloads.
ELECTRICAL:
Power Distribution Board:
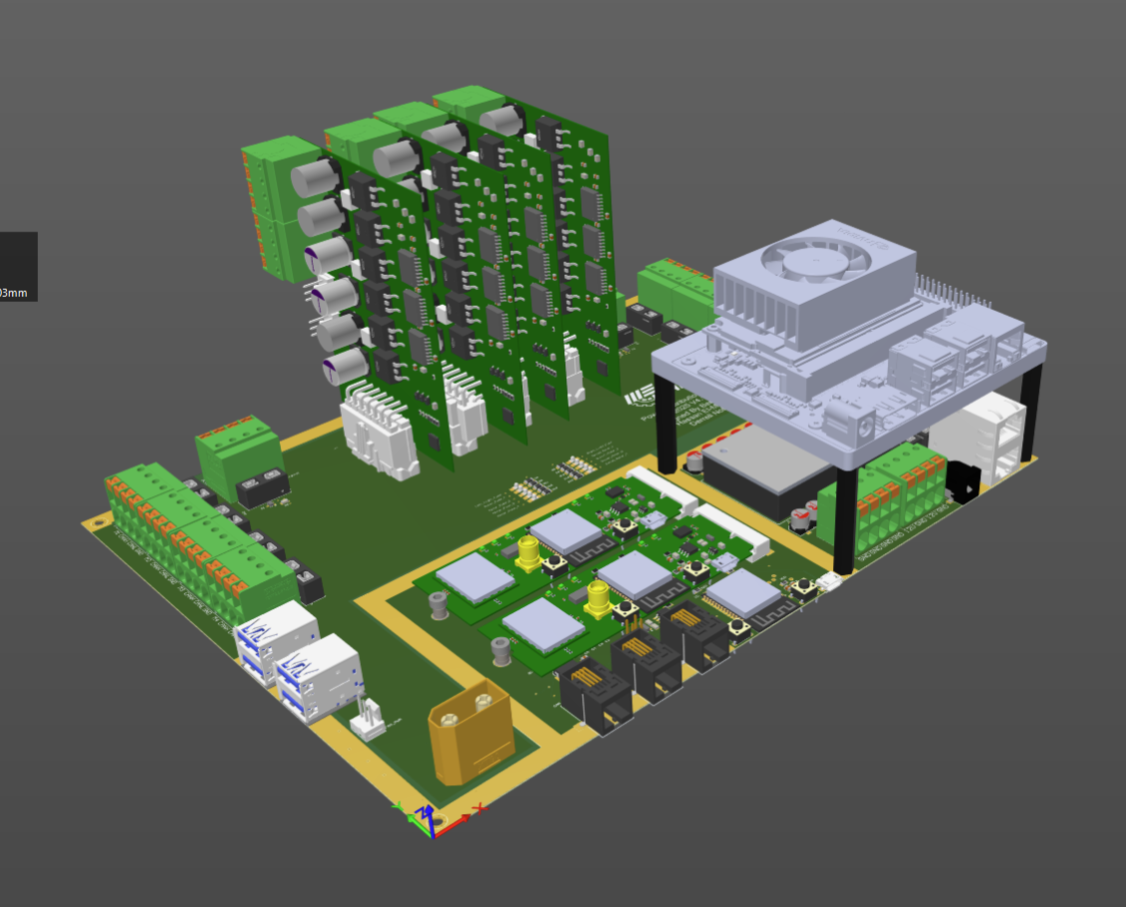
This season's power distribution board (PDB) has seen a major change. In previous seasons, we've dealt with extremely messy internals due to the sheer volume of wiring; however, with our new knowledge, we've decided to shift our power distribution architecture to be more like a motherboard. This means that our other PCBs are now modular relative to the PDB. They can be plugged directly into the PDB with no extra wires necessary, meaning the only wires we need are those exiting the chassis rather than cluttering the interior.
GNSS:
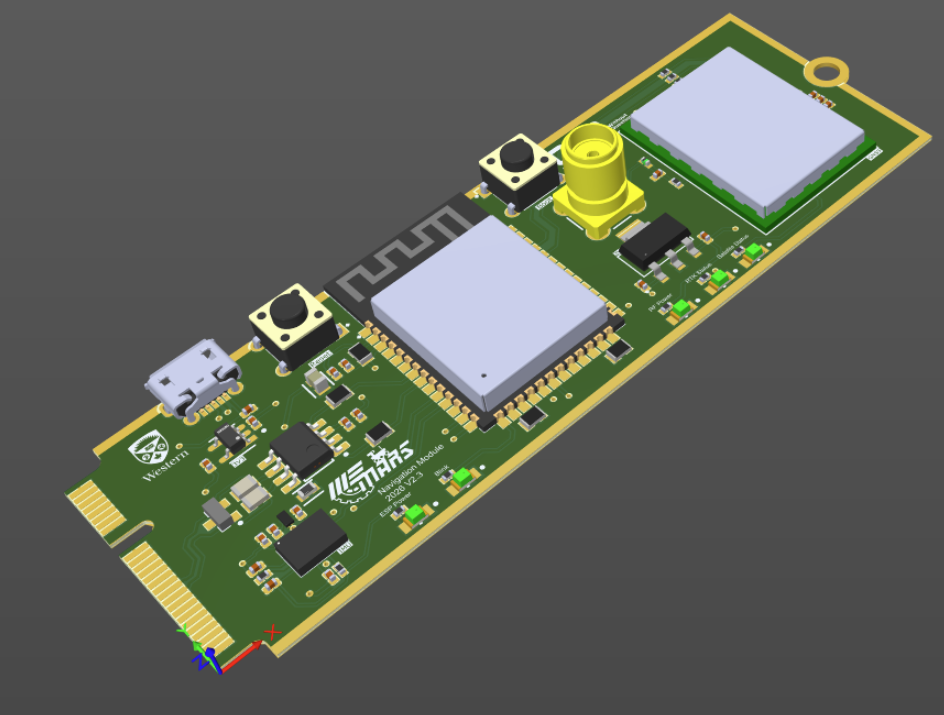
Our new GNSS board is being developed using the U-blox ZED-F9R/ZED-F9P modules. We previously used the NEO-M9N for our first GNSS design, and now that we are confident in our implementation, we have decided to upgrade to these higher-performance chips. This new GNSS board will allow us to achieve RTK-level precision and provides the capability to pursue autonomous navigation. We need to produce two of these boards: one for the rover and one for our home base. As shown, the board features an NVMe-style connection, which allows it to plug directly into the PDB for a clean, modular integration.
To PCBWAY:
First off, thank you for taking the time to read about our design. We are extremely excited about the future of this project, and we would be happy if you would join us on this journey. Any support in any area would be greatly appreciated; as you can see from our design, we have parts requiring CNC machining, laser cutting, bending, and 3D printing, alongside PCBs that need to be manufactured. We look forward to the possibility of working together!
Apply for sponsorship >>- Comments(0)
- Likes(0)