ERGOS: Dynamic Gait Humanoid Servo Robot
About Me
I am currently an undergraduate student at the University of Western Ontario, studying Mechatronics and AI Systems Engineering. As you can probably tell from my degree title, I have a huge passion for robotics, and I genuinely enjoy the material I learn and the work I complete in school. For the past three years, I've served as the Lead Software Engineer on Western's rover club, WEMARS, working on various software components for the rover. I've also gotten the chance to experience two different internships, one of which I am currently working at. Outside of school and work, I love spending time with my two adorable dogs, I am definitely a dog person.
Project Description
Disclaimer: All related project files, mechanical parts, PCB design documents, and documentation can be found on my GitHub
While I have worked on multiple personal projects, including a robotic arm using PWM servos, I wanted to delve into my passion for robotics further. I decided to start a project I'd been thinking about for a while: a humanoid robot that uses serial servos as the main actuators. This robot is intended to be capable of achieving dynamic movement through reinforcement learning, and I've been working on the project for the past eight months. It is truly a mechatronics project as I am completing every aspect of this project, including the mechanical design, electrical design, and soon, the software design.
I can give a simple overview of each sub-system:
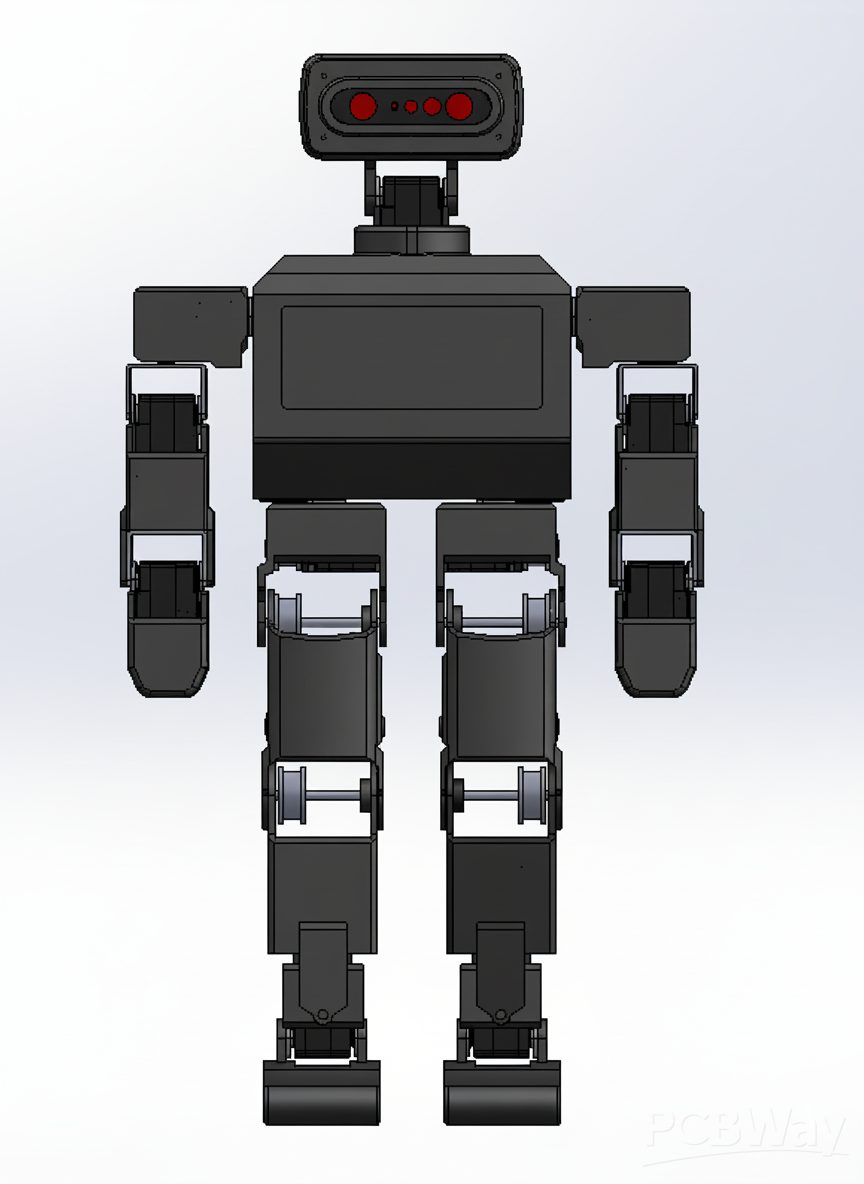
- Mechanical: The robot uses serial servos to achieve the extra precision required for dynamic movement. I anticipate facing challenges with these types of actuators, such as backlash, but I am prepared to overcome them. For the robot's legs, I've implemented pulley systems in the joints that require the most torque. The torques for the entire robot were calculated using static analysis, which essentially represents a worst-case scenario requirement, ensuring all torque needs will be met.
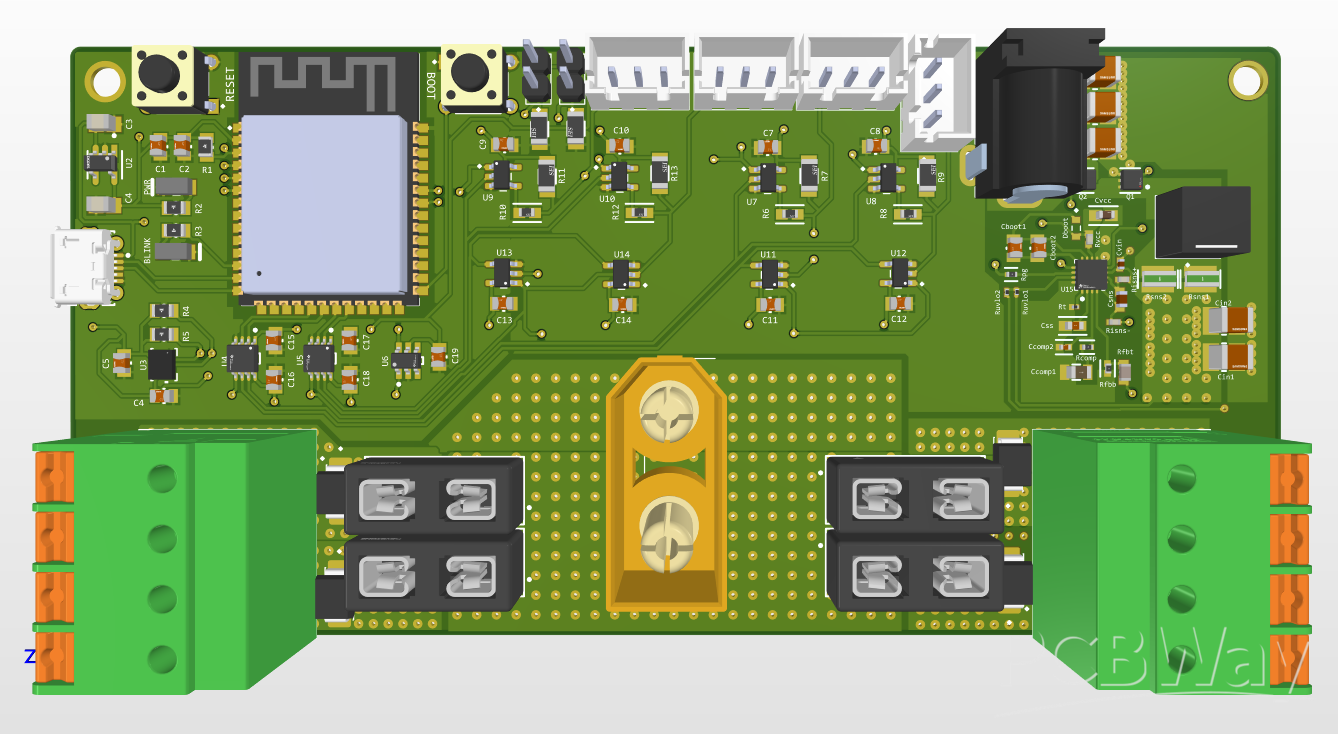
- Electrical: The robot uses two types of serial servos running at 12 V (50 kg.cm at 4.2 A max draw and 30 kg.cm at 2.7 A max draw). With approximately 20 DOF (12 of the 50 kg.cm servos and 8 of the 30 kg.cm servos), my custom-designed PCB must handle a potential (though unlikely) maximum current of 72 A. Power is supplied by a 3S LiPo battery connected via an XT90 connector, and the PCB's layout (which is included at the bottom of the full message) manages the current distribution through four branches corresponding to the robot's limbs. I plan to create custom harnesses to ensure individual servos do not draw the full branch current. For control, the reinforcement learning model on a Jetson Orin Nano connects serially to the PCB, sending servo positions to the onboard ESP32-S3 MCU. The MCU then transmits these positions to the actuators, although, since the servos use half-duplex UART protocol, I had to create a solution to properly interface them with the full-duplex UART pins of the ESP32-S3.
- Software: Since the robot's physical components are still being manufactured, my software work is focused on planning and simulation. I have created a URDF file, which is a detailed digital model of the robot, to use in a physics simulator. This virtual environment will be used to train a Reinforcement Learning (RL) model that will teach the robot to achieve dynamic, balanced movements. The final trained control program will be deployed on the Jetson Orin Nano and will send position commands through the ESP32-S3 MCU to control the serial servos.
To PCBWay
This project is a culmination of my passion for robotics, and I like to believe that it shows my goal to go above and beyond in what I do. Due to the nature of the project, I have applied to multiple sponsors. I have currently received $2,000 in funding from Western University's Thompson Innovation Fund, as well as $750 from the Western Engineering Student Engagement Fund (WESEF). In terms of external funding, I have received a discounted camera from Luxonis, and I am hoping to add PCBWay to my list of sponsors! The reason I am reaching out is to hopefully receive a discount, or more, on the manufacturing of my custom PCB. This is a four-layer board, with the top and bottom layers being 2 oz copper, and the internal planes being 1 oz. The power pours have stitching on the top and bottom to increase both current capability and heat dissipation. I would also ideally like to have PCBA done during the manufacturing process, as I am not as confident in my skills for soldering a QFN package! However, whatever PCBWay is willing to contribute, I would be extremely grateful to receive. The final goal of this project, though it may take time, is to publish a paper on the work, specifically focusing on reinforcement learning implemented on a low-cost servo humanoid. I believe that while it will be a challenge, I will eventually achieve it, and if PCBWay sponsors me, they will definitely be mentioned :). Finally, I'd like to say thank you for reading about my project and what I am trying to achieve here.
- Comments(0)
- Likes(0)