




URO Robotics Eurobot 2026
Hello,
We are URO Robotics, a team of higher education students from Spain, and we’d like to share a little about the project we’re currently working on with passion, patience, persistence… and a lot of late-night debugging.
Our team was formed by a group of students from different technical backgrounds who share one big obsession: robotics. We’re not a formal university club, nor are we backed by a large institution. We are a self-managed team of students with the support of our center, dedicating time, effort, and even our own savings to build something we truly care about. And what do we care about? Robots that work. (Most of the time.)
We’re currently preparing for Eurobot 2026, an international robotics competition with participants from all over Europe. Eurobot isn’t your average tech contest — it's a hands-on, full-scale robotic challenge that pushes teams to design, build and program autonomous robots capable of completing complex tasks, all without human intervention. The competition begins at a national level, and the best teams advance to the European finals held around April or May.
This year's theme, titled “Winter is Coming”, is as imaginative as it is challenging. In this scenario, squirrels (represented by robots, naturally) must collect acorns that evil humans have boxed up and abandoned. The mission? Recover as many acorns as possible in just 100 seconds, warm them up, build nests, and prepare for a mechanical winter before the humans return from their coffee break. It's a creative setup, but one that demands serious engineering: object detection, manipulation, autonomous navigation, obstacle avoidance, multi-tasking, and more.
To make things more interesting, the competition also introduces SIMAs, small auxiliary robots that accompany the main squirrel robot to perform parallel tasks. They may be small, but they add complexity to coordination and strategy. And yes — we’ve designed those, too.
Everything you see in our project is entirely built by us. From the mechanical frame, to the electronic circuits, software, 3D prints, PCBs, and every bolt in between. We use multiple microcontrollers communicating over both wired and wireless channels. Our system integrates artificial vision using ArUco markers for localization and task verification. We’ve implemented advanced sensor arrays for position detection, alignment, and environmental awareness. All of this is developed, tested, and refined in our workshop and classrooms — no kits, no templates, no shortcuts.
We’ve even designed a custom PCB to reduce the classic chaos of DuPont cables (which gave us a lot of headaches last year with loose connections and debugging nightmares). This PCB is tailored to our robot’s needs and helps us bring order, robustness, and modularity to the system. It’s currently ready for manufacturing, and we're excited to put it to the test.
Looking back, our first participation in Eurobot last year was, let’s say… humble. We had limited time, a 3-wheeled omnidirectional base, a green and black color scheme, and a lot of duct tape. But we learned a lot — and what we lacked in resources, we made up for in creativity and enthusiasm. Our robot worked (barely), and our team survived the experience with new skills and renewed motivation.
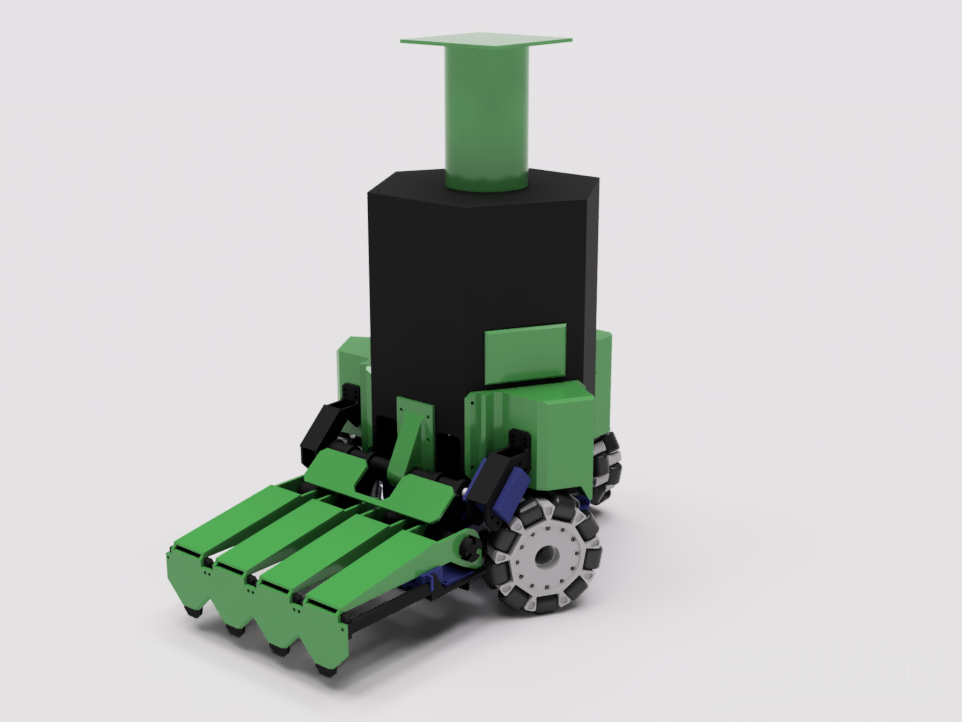
This year, we’re taking things seriously. Our new robot has a 4-wheel chassis, a sleek orange and black look (because style matters), industrial-grade connectors provided by some of our sponsors, a powerful internal communication structure, and a strategy designed to go all the way to the finals. The SIMAs are also in place and fully integrated into the project.
We are proud to say that our work brings together various disciplines: mechanical engineering, electronics, embedded systems, artificial vision, software development, and teamwork. Every element — from the screw placements in the chassis, to the way the microcontrollers communicate, to how the robot detects and manipulates game elements — has been developed in-house by us, from scratch. We don’t reuse commercial robot kits or borrow existing code; we build, fail, improve, and repeat until it works.

We’re fortunate to have the support of a few companies across Europe who believe in the value of student-led technical projects like ours. Our educational center also provides us with some resources and lab time — which helps a lot — but most of the progress is made outside of class hours, fueled by pizza, late-night design reviews, and way too many hours of simulation.
And yes, we've put a significant amount of our own money and free time into this, because for us, robotics is not just a project — it’s a passion. Whether it's figuring out why the I2C bus randomly crashes, or debating if the robot should turn left or right first when collecting acorns, we do it because we love it. And because there's no better feeling than seeing a machine you designed from the ground up complete a mission successfully (after failing the previous 23 tries).
At the end of this message, you’ll find a few photos and short videos of our prototypes, early models, and current progress. Don’t expect us to reveal everything though — we know there are some very curious teams out there who’d love to copy our ideas!
In this message, you’ll find a few photos of our prototypes, early models, and current progress. We’ve also included a team photo from our recent visit to MATELEC at IFEMA, one of the biggest technology fairs in Spain, where we went in person to connect with potential suppliers and sponsors. Because when it comes to building robots, we don’t just work in the lab — we go out there and chase every opportunity to make our project better.
Don’t expect us to reveal everything though — we know there are some very curious teams out there who’d love to copy our ideas!
Warm regards,
The URO Robotics Team


- Comments(0)
- Likes(0)












