



UCI HyperXite 10
The UCI HyperXite team is a student-led team that participates in the Hyperloop competition. Through researching and developing prototypes, we aim to revolutionize the transportation industry at a low cost, while ensuring the safety, health and welfare of the public.
The Hyperloop is a concept popularized by SpaceX in 2013. HyperXite is developing and building a next-generation transportation pod that is safer, cheaper, faster and more energy efficient than cars, planes, boats, and trains by incorporating a Linear Induction Motor (LIM) and zero-friction Mag-Lev system.
Our team consists of 39 undergraduate students from engineering and computer science backgrounds working in 9 subteams: Thermal Management, Statics, Propulsion, Powers, Levitation, Dynamics, Controls, Braking, Aerodynamics, and Operations.
The Powers subteam is developing an advanced electrical system to support our pod’s operation. This includes a low voltage Control Board PCB that interfaces all electronic components with a Raspberry Pi, ensuring real-time monitoring and control of the pod’s power, movement, and temperature. Additionally, we are redesigning our high voltage system to enhance the functionality of our Variable Frequency Drive (VFD), which will supply three-phase AC power to our Linear Induction Motor (LIM). Another key aspect of our design is the integration of a Battery Management System (BMS) and Insulation Monitoring Device (IMD) into our system. We aim to develop a safety circuit design with these components that will regulate voltage and current, ensuring a reliable power supply. The Control Board is integral to this improved high voltage system, interfacing the Raspberry Pi with our BMS and IMD and shutting the pod off when it detects power hazards. As such, the Control Board PCB is a core component of our pod.

Our Control Board PCB design in Altium.

Our Raspberry Pi 5.
1. Power Monitoring
Our Control Board PCB allows the VFD, BMS, and IMD to communicate with the Raspberry Pi via CAN protocol. The PCB features a set of differential pairs connected to a CAN breakout board, implementing CAN bus interface. The CAN breakout board is routed directly to the Raspberry Pi, communicating via SPI protocol. This network alerts the Raspberry Pi if the VFD’s voltage or current reaches dangerous levels, shutting off the pod.
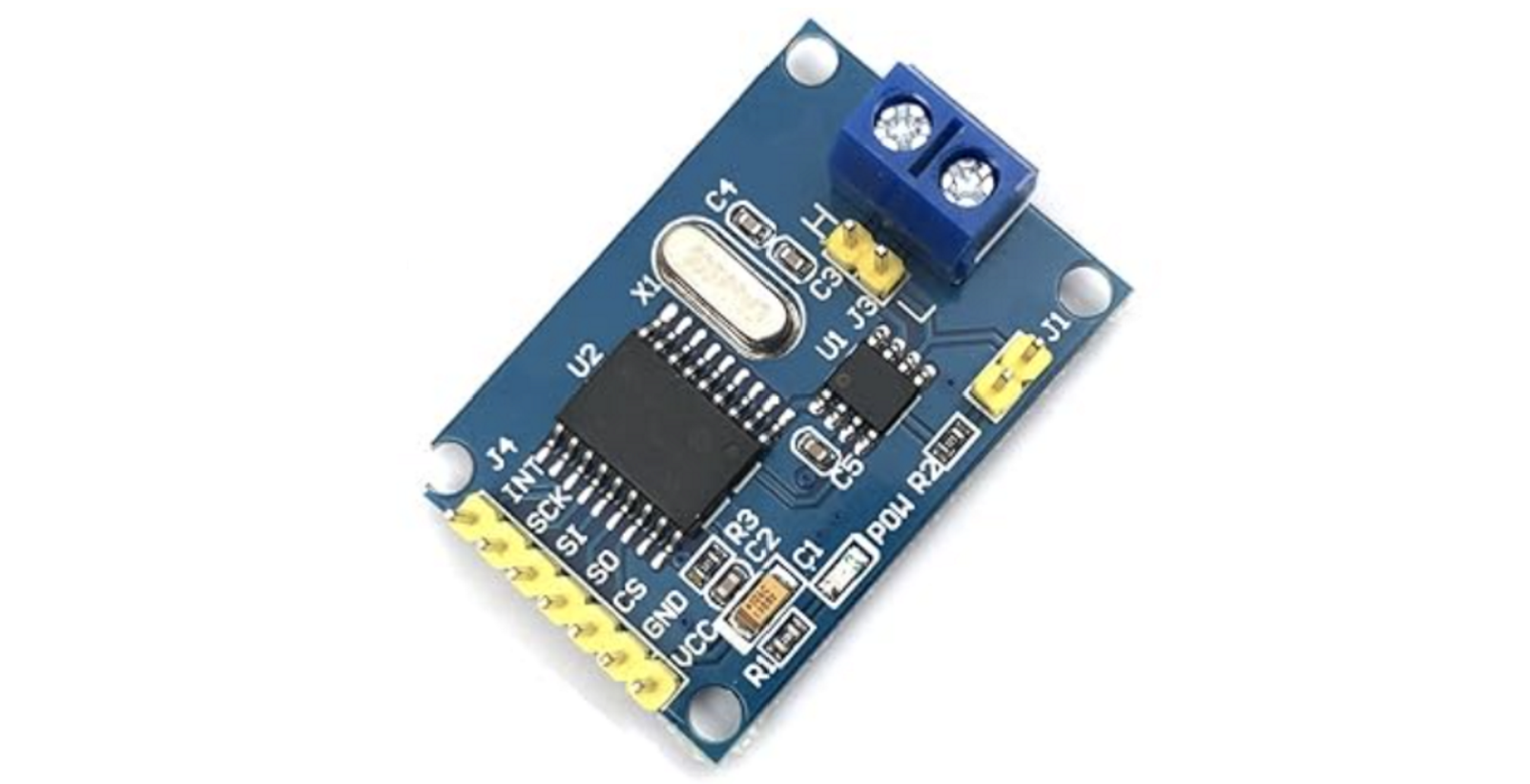
Our CAN bus module, interfacing the high voltage components with the Raspberry Pi.
2. Movement Monitoring
The Control Board features a gyroscope and several I2C header pins to connect to three Time of Flight (ToF) sensors. All these components are routed to the Raspberry Pi’s I2C pins. The gyroscope measures the pod’s acceleration, and the ToF sensors measure the angle of the pod relative to the track. If the pod’s trajectory strays too far off course, the Raspberry Pi will detect this and shut off the pod.

One of our Time of Flight sensors to detect changes in the pod’s movement angle.
3. Temperature Monitoring
The Control Board uses a network of thermistors and analog-to-digital converters (ADCs) to monitor the pod’s temperature. The thermistors are connected in voltage divider schematics to the board’s 5V plane. When the temperature increases, the thermistors’ resistance decreases, which also decreases its voltage. The ADCs are wired to the thermistors, measuring their voltages and converting them to digital values to send to the Raspberry Pi via I2C. When this value is very low, the Raspberry Pi will realize the temperature of the pod is too high and shut it off.

One of our analog-to-digital converters to detect changes in temperature from the thermistors.
PCBWay’s support would be a stepping stone in our team’s success. We are dedicated to designing a new pod every year for annual international competitions, and we always strive to improve our PCB designs. Manufacturing a prototype quickly would help us test our design sooner and provide feedback to our team members in time for the Hyperloop Global competition in May 2026.
We are excited about the opportunity to work with PCBWay to accomplish our goal of creating a next-generation pod with their support.

Our team.
Apply for sponsorship >>- Comments(0)
- Likes(0)
 More by Engineer
More by Engineer
-
 UCI HyperXite - SpaceX Hyperloop Competition
Established in 2015, HyperXite is a dedicated group of undergraduate engineering students on a missi...
UCI HyperXite - SpaceX Hyperloop Competition
Established in 2015, HyperXite is a dedicated group of undergraduate engineering students on a missi...
-
 HyperXite 11: Hyperloop Research and Development
HyperXite 11 is a research and development project team at the University of California, Irvine. The...
HyperXite 11: Hyperloop Research and Development
HyperXite 11 is a research and development project team at the University of California, Irvine. The...
-
 UCI HyperXite 10
The UCI HyperXite team is a student-led team that participates in the Hyperloop competition. Through...
UCI HyperXite 10
The UCI HyperXite team is a student-led team that participates in the Hyperloop competition. Through...










