Navi USV Team Autonomous Surface Vehicle
About Navi USV Team
Navi USV Team is a student engineering team developing an autonomous unmanned surface vehicle for challenging maritime missions and international competitions. Bringing together mechanical design, embedded electronics, power systems, sensor integration, and autonomy software in a single platform, the team has already demonstrated its technical capability through strong results in past events, including a 4th-place overall finish at the Njord Autonomous Ship Challenge and recognition in national technology competitions such as TEKNOFEST. Building on these achievements, Navi USV is now focused on creating a more robust, reliable, and competition-ready electrical architecture. One of the most critical steps in this transition is replacing off-the-shelf solutions with custom-designed power electronics tailored specifically to the vehicle’s propulsion and onboard distribution needs. Inspired by the sponsorship-style presentation format used in PCBWay community project pages, this document explains why custom PCBs are essential for Navi USV and presents the planned ESC and PDB designs together with early design and simulation results. The ESC circuit schematic is planned to be simulated in LTspice and PSpice in order to verify the correct operation of the voltage regulation, signal protection, and current sensing stages before manufacturing. Early analyses include a voltage regulator study based on the LT1085, a signal-clamping analysis showing protection of the microcontroller at 3.3 V, and a differential op-amp circuit designed to amplify the small voltage difference across MOSFET terminals so that current can be calculated accurately by the microcontroller.
Why Custom PCBs Matter for This Vehicle
Marine platforms impose different constraints than standard hobby systems. The propulsion line must handle high current safely, maintain reliable switching behavior, reduce wiring complexity inside the electronics enclosure, and provide stable power to all subsystems. By integrating two ESC modules on a single board and centralizing power distribution on a dedicated PDB, Navi USV aims to improve electrical safety, packaging efficiency, maintainability, and overall system robustness.
1. Electronic Speed Controller (ESC)
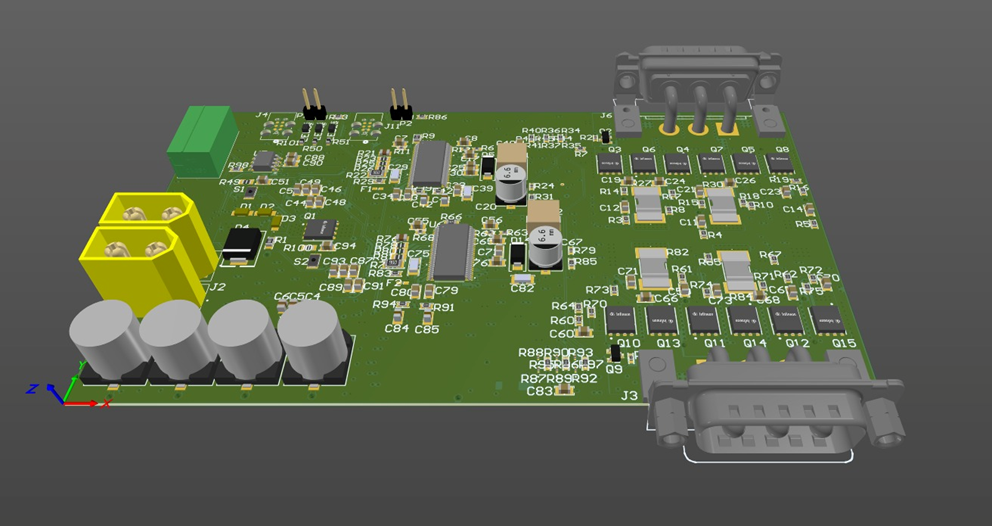
For this project, a dedicated Electronic Speed Controller will be designed to control the underwater propulsion motors. Since standard ESC solutions are not sufficient for the system’s high-current requirements, a custom driver architecture will be developed specifically for Navi USV.
Two ESC modules will be integrated on a single card, allowing the team to obtain a more compact and simplified electronics stack. Power-stage components will be selected according to the maximum motor current values, and the final design will be configured to ensure safe, stable, and repeatable motor operation under demanding marine conditions.
2. Circuit Analysis and Simulation Approach
The ESC schematic blocks will be analyzed using LTspice and PSpice. These tools were selected because they provide a practical and accessible environment for validating circuit behavior before hardware production.
Simulation results will be used to verify whether the board-level circuits and integrated devices operate as intended, helping the team reduce design risk before fabrication and assembly.
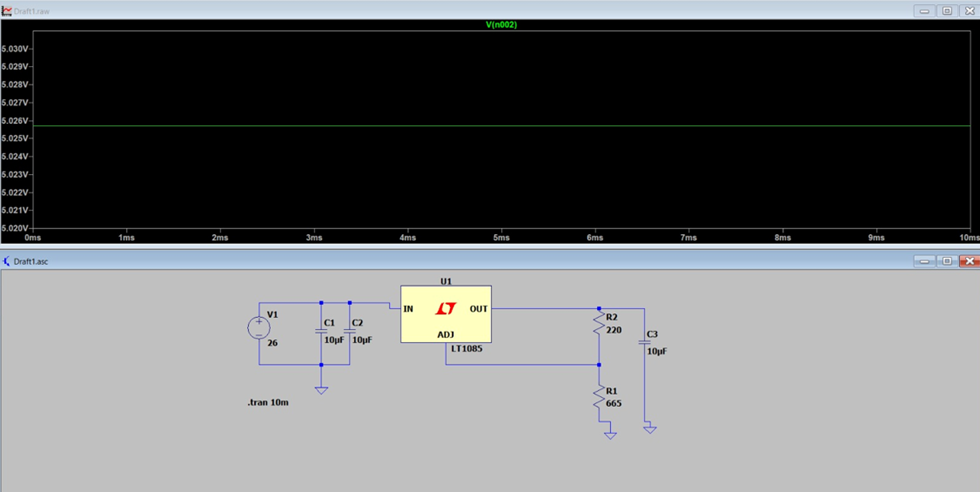
Voltage Regulator Analysis (LT1085). The schematic represents an adjustable LT1085 regulator stage that reduces a 26 V input to approximately 5 V through a resistor divider. The corresponding waveform confirms the regulated output level.
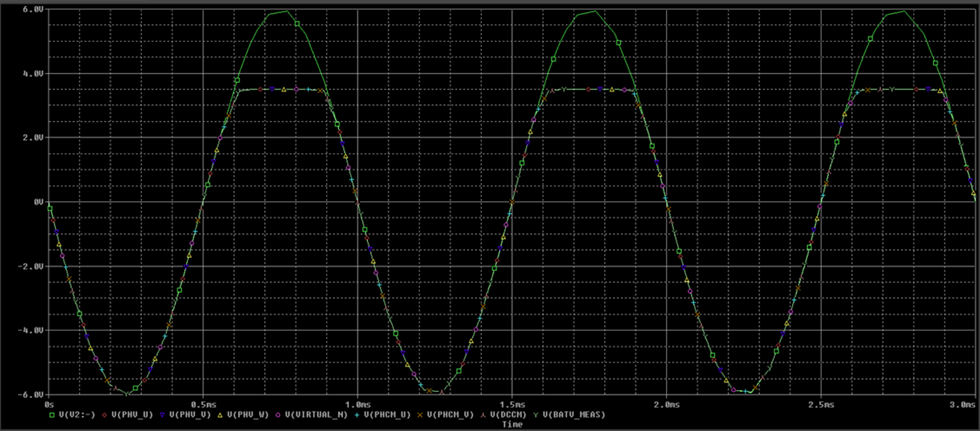 Signal Clipping Analysis. The graph shows a sinusoidal signal being clamped to the 3.3 V level by a protection diode, preventing the microcontroller input from being exposed to a damaging overvoltage condition.
Signal Clipping Analysis. The graph shows a sinusoidal signal being clamped to the 3.3 V level by a protection diode, preventing the microcontroller input from being exposed to a damaging overvoltage condition.
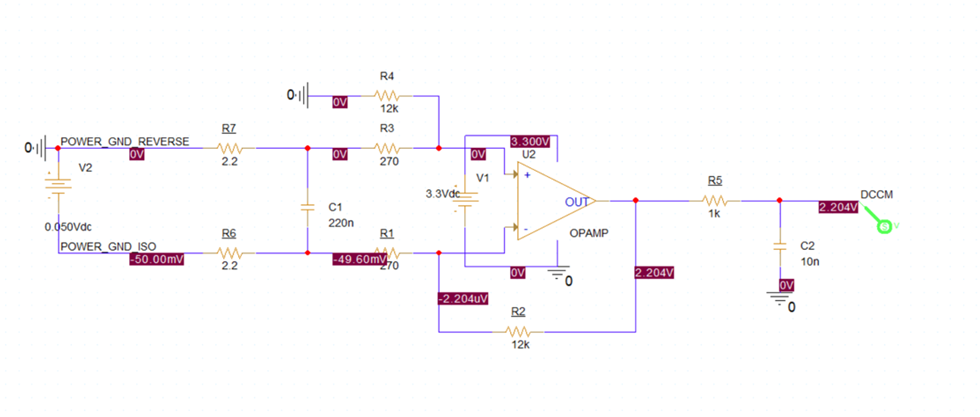
Differential Op-Amp Circuit. This circuit is designed to measure the small voltage difference across MOSFET terminals. By amplifying this differential signal to a level readable by the microcontroller, the design enables current estimation and feedback.
Why This Project Fits a PCB Sponsorship Model
Like other competition-driven university engineering teams, Navi USV depends on fast and reliable PCB manufacturing to turn validated designs into field-tested hardware. The ESC and PDB are not generic boards; they are mission-critical subsystems that directly affect propulsion reliability, electrical safety, and packaging quality inside the vehicle.
Support in PCB fabrication and assembly would help the team shorten iteration cycles, test improved revisions more quickly, and move from simulation-verified design to on-water validation with greater confidence. For a platform operating in a marine environment, this kind of iteration speed is especially valuable because electrical robustness must be proven not only on the bench but also during full-system trials.
In this sense, custom PCB support would contribute not just to a single board order, but to the broader engineering growth of the team. It would allow students to gain hands-on experience in power electronics, embedded control, CAN communication, protection design, and system integration while developing a more reliable autonomous vehicle for future competitions.
Conclusion
The Navi USV ESC development effort represents a focused step toward a safer, cleaner, and more capable electrical architecture for the team’s autonomous surface vehicle. With custom propulsion control, centralized power distribution, and simulation-backed design decisions, the project aims to deliver a compact and reliable electronics solution suitable for demanding competition conditions.
Apply for sponsorship >>- Comments(0)
- Likes(0)