




Mars Rover UdeGSpace

Our project is the development of Kukulcán, a custom-designed core electronics system for a Mars-analog exploration rover built by an international student team competing in the University Rover Challenge. The challenge, organized by The Mars Society, is one of the most demanding student robotics competitions in the world, requiring rovers to operate in harsh desert conditions while performing autonomous navigation, science experiments, equipment servicing, and long-range communication.
Our team has qualified as finalists in the University Rover Challenge twice, representing Mexico at an international level. Through these years, we learned that commercial off-the-shelf electronics are not designed for the environmental, reliability, and integration constraints imposed by planetary-style robotics. Latency, noise, power integrity issues, and limited observability become critical failure points in desert environments that closely resemble Mars.
Kukulcán was born from this necessity:
to design our own technology, fully understood from schematic to firmware, and optimized specifically for autonomy, robustness, and field repairability. Beyond competition performance, this project represents a broader goal—to push Mexican space and robotics technology to its limits, proving that student-led engineering in Mexico can produce world-class, mission-critical systems.
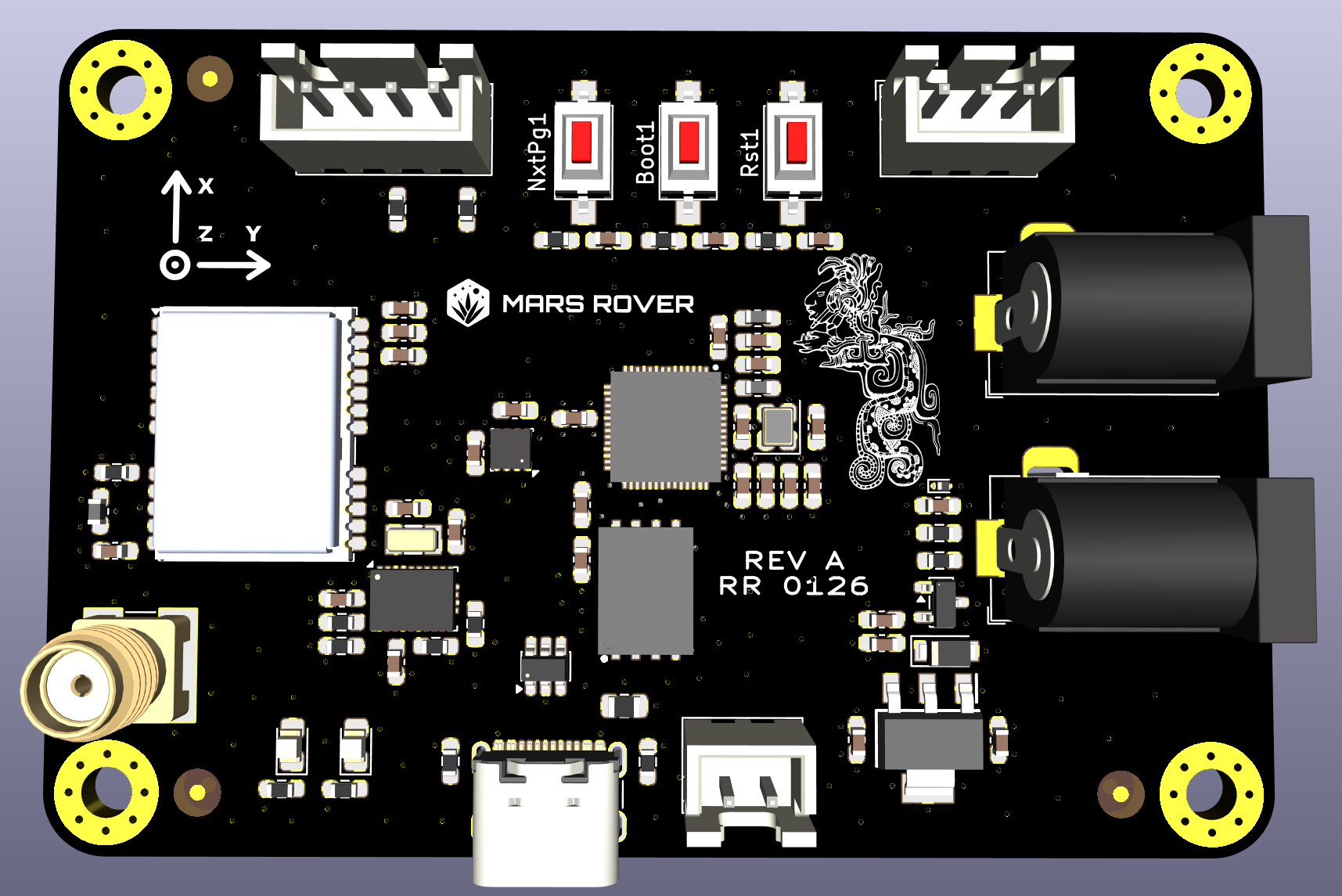
Kukulcán is a custom multi-layer PCB that acts as the rover’s nervous system. It bridges high-level onboard computing with low-level real-time control and sensing. The board integrates:
A high-performance microcontroller responsible for deterministic real-time tasks
Power regulation, monitoring, and protection stages designed for noisy loads and field operation
Sensor and actuator interfaces (IMU, GNSS, motor control, status indicators)
Robust communication links to the rover’s main computer running ROS 2
Debug, test, and recovery features essential for rapid iteration during competition
This PCB enables reliable autonomy, precise navigation, and safe power distribution across the rover. It is not a prototype board—it is a flight-style system, designed following real engineering practices used in aerospace and robotics.
Manufacturing and assembling Kukulcán requires high-quality PCB fabrication and assembly. Signal integrity, power planes, soldering quality, and assembly precision directly affect system reliability. PCBWay’s capabilities allow us to transform a rigorously designed electronic system into a physically robust board that can survive real desert missions.
By supporting Kukulcán, PCBWay is directly enabling:
Student-developed space-grade electronics
International representation of engineering talent
Open, educational, and innovative robotics development
This sponsorship does not fund a hobby project—it supports a mission-critical system that will operate in one of the most demanding student robotics competitions in the world.
Team & Contact Information
🌐 Website: https://marsrover.mx
📍 Location: Guadalajara, Jalisco, Mexico
📧 contacto@marsrover.mx
info@marsrover.mx
📞 Phone:
+52 (33) 1075 5440


- Comments(0)
- Likes(2)












