




Marmara Rover Team | Mars Rover for ERC & ARC
Team Introduction
Founded in October 2024 within Marmara University, the Marmara Rover Team brings together students from various disciplines such as engineering (materials, electronics, mechanical, bioengineering), biology, chemistry, and computer sciences. With this multidisciplinary structure, we have proven our success in autonomous driving and challenging tasks in national competition (TEKNOFEST) with the Unmanned Ground Vehicle (UGV) prototype we developed.
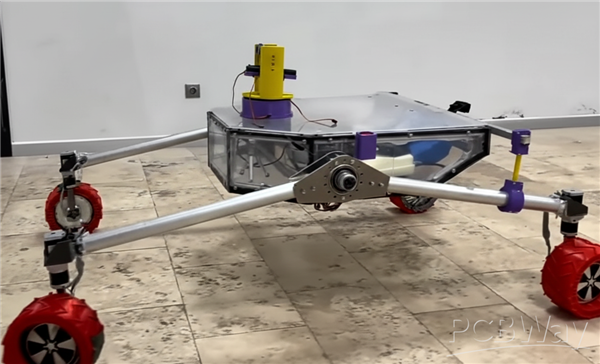
Figure 1. Our first prototype vehicle
Current Projects and Competitions
In line with our future vision, we have set our sights on the international arena. Our goal is to represent our country and university at the European Rover Challenge (ERC) and Anatolian Rover Challenge (ARC). To this end, we are developing a next-generation vehicle equipped with an advanced science laboratory, a high-mobility robotic arm, and fully autonomous navigation systems.
Technical Infrastructure and PCB Designs
With the vision of "Domestic design, original software," we design critical electronic hardware in-house to maximize system performance. The main boards we aim to produce are as follows:
- Sensor Interface Unit
Ensures the vehicle's environmental awareness. It processes data from dual NEO-M8N GPS, MPU9250 (IMU), and BME280 sensors and transmits it to our main computer, the NVIDIA Jetson Orin Nano, via the industrial standard CAN-Bus protocol.
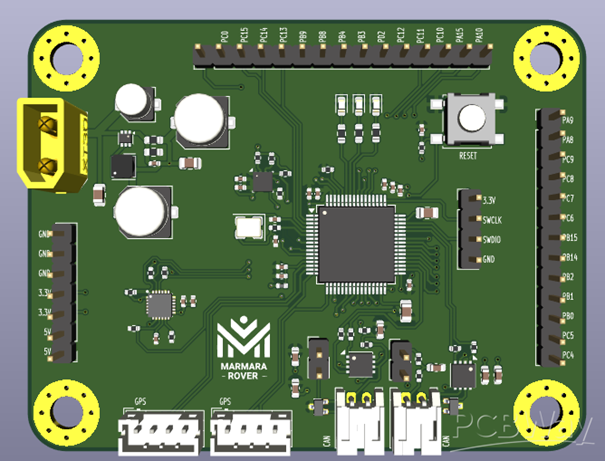
Figure 2. Sensor Interface Unit PCB design
- FOC Supported BLDC Motor Driver
Customized for our wheel motors that require high torque and precise speed, this board is based on Field Oriented Control (FOC) architecture. With integrated Hall sensor interfaces, it instantly tracks rotor position, flawlessly providing the precise speed and torque regulation critical for rough Mars simulation terrains. (Development process is ongoing.)
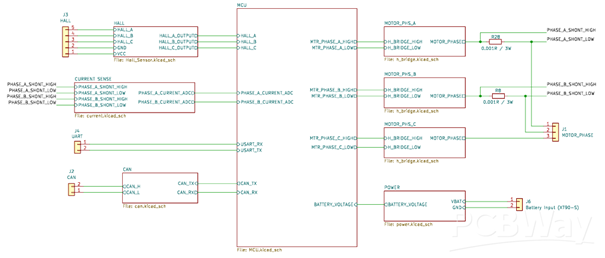
Figure 3. BLDC Driver Schematic Design
- Power Distribution Board (PDB)
Manages the energy requirements of the system (PC, motors, sensors). It guarantees the stable operation of all subsystems by converting voltage with high-efficiency regulators.
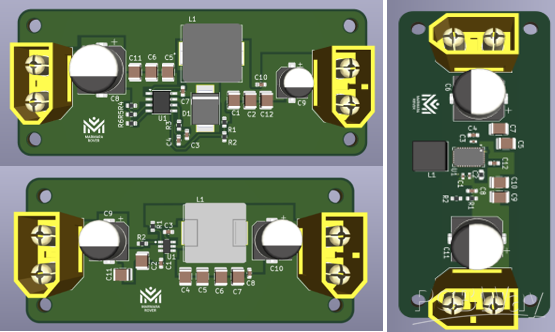
Figure 4. Power Distribution Board PCB design
- Stepper Motor Driver
Developed for the control of robotic arm joints and the 360-degree steering of each wheel. It offers millimetric precision and smooth maneuverability with high micro-step resolution.
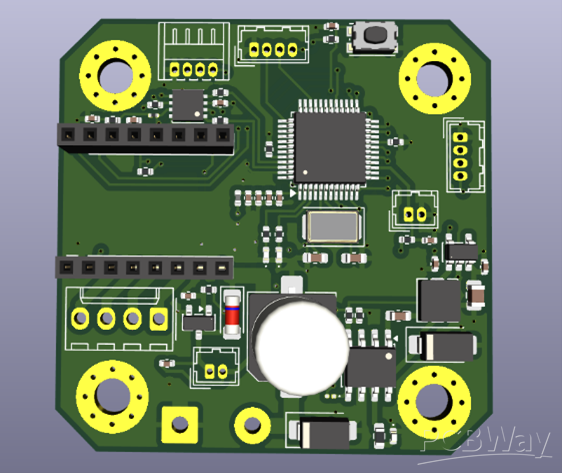
Figure 5. Stepper Motor Driver PCB design
Mechanical Design
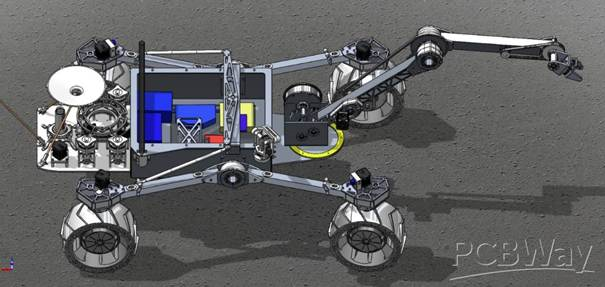
Figure 6. Comprehensive CAD design
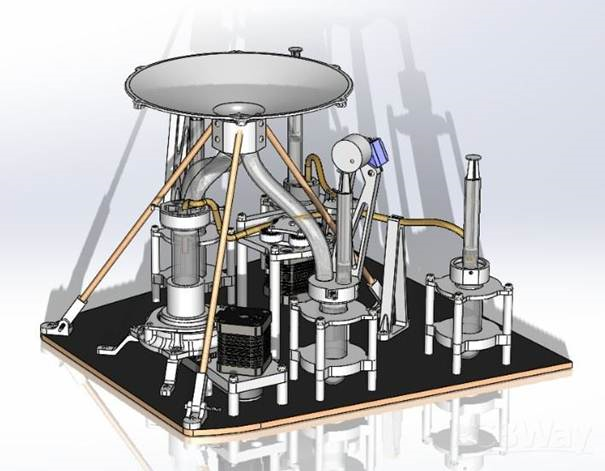
Figure 7. Lab System Design
Collaboration with PCBWay
As the Marmara Rover Team, in the intense R&D process we carry out with the vision of representing our country in the international arena, our limited student budget and the time pressure created by the competition calendar are the main factors limiting our innovation potential. The fast and high-quality production support offered by PCBWay with its industry experience will allow us to take bolder steps in our designs, accelerate our development processes, and produce systems that will work flawlessly in difficult conditions such as Mars simulations.
MARMARA ROVER TEAM
website: https://www.marmararover.com
LinkedIn: https://tr.linkedin.com/company/marmara-rover
- Comments(0)
- Likes(0)












