




Hyperloop by Waterloop: transportation of the future
Waterloop is a student team from the University of Waterloo, dedicated to designing hyperloop pod prototypes. Our mission is to design and build a working, full-sized, scalable Hyperloop pod by 2025 to demonstrate the feasibility of Hyperloop pods in the transportation industry.
The main methods of transportation have been cars, trains, and planes for many years but these do not meet the increasing need for transportation that accommodates a fast paced life, so we figured it was time for change. Major highways and city areas in Canada, and other countries, are often clogged with traffic, making it difficult to travel from province to province. The increasing social concern for carbon emissions and ever rising prices of gas put added pressure on the need for solutions.
A hyperloop pod travels in a near-vacuum tube that helps remove friction. This paired with levitation, caused by particular propulsion, can allow the pod to reach top speeds of over 1000km/h.
In our most recent prototype, Goose 5 (G5)(unveiled November 2021), we demonstrated contactless propulsion. This was our most technically advanced design so far and was a huge step towards our goal of a fully functional pod. We used a Linear Induction Motor as the propulsion system for our G5 pod, which uses copper coils to create a magnetic field that pushes the pod forwards when reacting with the track. The pod’s major systems are powered by a custom 14 cell High Voltage Battery pack made by our team. To manage the battery, our electrical sub-team designed in-house Battery Management System (BMS) boards. These boards play a very important role in the pod since the battery cells can be quite unstable by themselves. The BMS monitors individual cells in the battery, and performs passive cell balancing which helps to conserve battery health. It is also responsible for isolating power, protecting the rest of the pod from faults in the battery pack. Another component designed by our electrical team is our motor controller. The motor controller is separated into two boards; the logic board with all the low voltage components, and the power board with all the high voltage components. This system takes power from the battery and uses it to control and power the motor. It can be used to fine-tune the pod’s performance. We also have braking systems in place that must be continuously lifted to allow the pod to move. In cases where a fault is thrown, the emergency braking systems automatically put the pod to a stop.
Here is some content with our pod's subsystems.
A demonstration of our Linear Induction Motor:

The aeroshell for our pod (it covers and protects the frame and other components):

Our High Voltage battery pack:

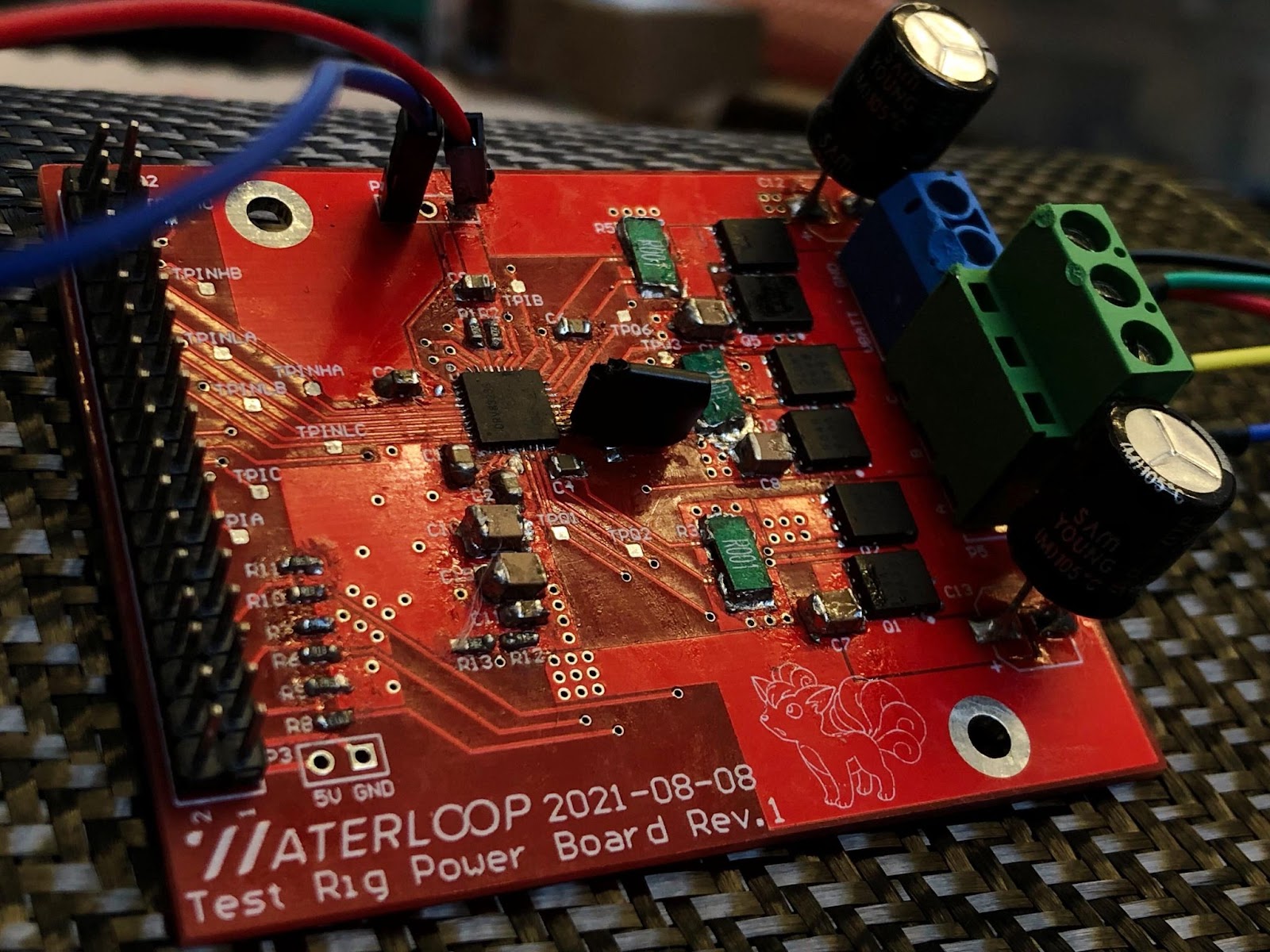
The power board from our motor controller system:
- Comments(0)
- Likes(0)












