




HyperXite 11: Hyperloop Research and Development
HyperXite 11 is a research and development project team at the University of California, Irvine. The team is dedicated to advancing the future of high-speed, sustainable transportation. The team places an emphasis on the full design, in-house fabrication, and testing of our next-generation Hyperloop pod. HyperXite develops innovative solutions that make transportation safer, more efficient, and sustainable. By bringing together students across multiple engineering disciplines, HyperXite builds on the 11 years of technical growth and collaboration to push the boundaries of Hyperloop pod design, systems integration, and research. Our goal is not only to compete at an international level, but also to create meaningful engineering work that contributes to the future of transportation technology.
The Power Systems and Controls subteams are developing the pod's electrical and software systems together. Power Systems is responsible for the high-voltage architecture, including the variable frequency drive (VFD), battery management system (BMS), and insulation monitoring device (IMD), as well as the safety circuitry and a custom PCB that hosts all the sensors on the pod. Controls writes the firmware that runs on the Nucleo H753ZI microcontroller, processing sensor data in real time to control the pod during operation.
This system monitors three main areas: braking, movement, and temperature. For braking, two pressure transducers output a 4-20mA signal representing upstream and downstream pressure across the pneumatic circuit, which two INA219 current sensors read and convert to digital data over I2C for the microcontroller. This allows us to monitor pressure changes and detect anomalies such as pressure loss, blockage, or overload in the pneumatic system. A LIDAR-Lite v3 measures distance from the pod to the end of the track, acting as a hardware-level braking failsafe. For movement, an MPU6050 tracks the pod’s roll and pitch to detect any instability during operation. For temperature, eight thermistors embedded in the LIM coils monitor heat buildup to protect against overheating.
The team is also improving the high-voltage system that powers the Linear Induction Motor (LIM). This includes the Variable Frequency Drive (VFD), along with the Battery Management System (BMS) and Insulation Monitoring Device (IMD), to help keep the pod’s electrical system safe and reliable. The control board PCB is a key part of making the pod operate safely and effectively.
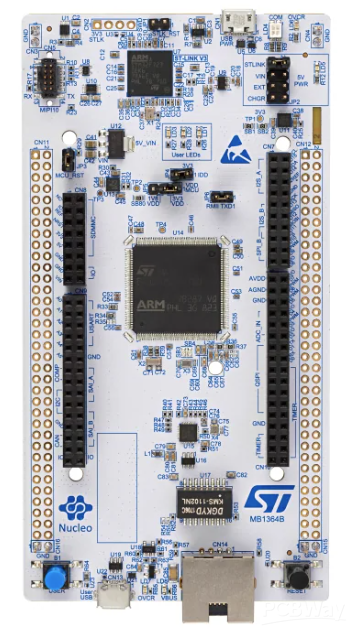
The Microcontroller used is the Nucleo H752ZI, which takes in information from the pod’s sensors and systems, processes it quickly, and helps control how the pod responds during operation
The 8 thermistors are embedded in the LIM coils to measure temperature data in real time. This helps the pod monitor motor heat, prevent overheating, and protect the system during the pod’s operation.
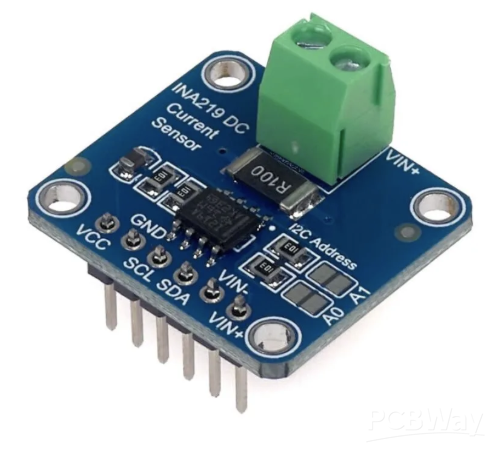
The two INA219s allow the pod to read pressure data from the braking system. They measure the current output from the pressure transducers and convert it into digital data that the STM32 can process.

The two pressure transducers monitor the pneumatic braking system by measuring upstream and downstream pressure. This helps the pod track brake system performance and confirm that pressure is being applied correctly.
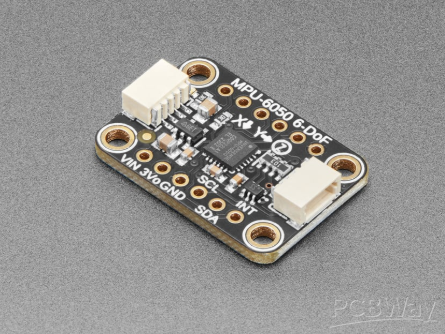
The MPU6050 monitors the pod’s roll and pitch to track its orientation and stability during operation.

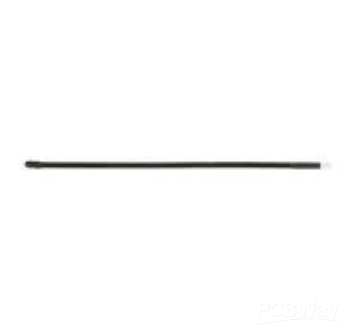
The LIDAR-Lite v3 is used as a braking failsafe by measuring distance and helping the pod detect when braking may be needed for the system.
As HyperXite 11 continues to design and develop a new pod for our next iteration, we are continually seeking ways to improve the quality, reliability, and performance of our PCB systems. PCBWay’s support is a meaningful step toward our team’s success. Their support helped bring us to Hyperloop Global and gain 1st place in best presentation, best guidance system, and best R&D for Levitation. Having the ability to manufacture a PCB prototype efficiently would allow our team to begin testing earlier, identify areas for improvement, and provide timely feedback to our members as we prepare for our next competition.
Beyond helping us meet competition deadlines, PCBWay’s support would directly contribute to our team’s hands-on engineering experience by allowing students to validate designs in a real-world setting and refine critical electrical systems through iterative testing. This opportunity would play a very important role in helping us turn our designs into a more responsive and enhanced Hyperloop pod.
We are excited about the opportunity to work with PCBWay once again and would be incredibly grateful for their support in helping HyperXite 11 advance our goal of building the next generation of transportation technology.
- Comments(0)
- Likes(1)
 More by Engineer
More by Engineer
-
 UCI HyperXite - SpaceX Hyperloop Competition
Established in 2015, HyperXite is a dedicated group of undergraduate engineering students on a missi...
UCI HyperXite - SpaceX Hyperloop Competition
Established in 2015, HyperXite is a dedicated group of undergraduate engineering students on a missi...
-
 HyperXite 11: Hyperloop Research and Development
HyperXite 11 is a research and development project team at the University of California, Irvine. The...
HyperXite 11: Hyperloop Research and Development
HyperXite 11 is a research and development project team at the University of California, Irvine. The...
-
 UCI HyperXite 10
The UCI HyperXite team is a student-led team that participates in the Hyperloop competition. Through...
UCI HyperXite 10
The UCI HyperXite team is a student-led team that participates in the Hyperloop competition. Through...










