




Build a Quadropod
Hello Everyone!
My name is Nico, and I am a student at TU-Wien with a strong focus on electronics, mechanical design, and robotics. I am currently developing a mobile robot platform intended as a learning and research system for computer vision and LiDAR-based navigation.
The project is inspired by a Dingo-style robot platform that is commonly used in student and maker environments. During discussions with peers and friends in the last few months as well as at 39C3, we identified several mechanical issues in the original design. In particular, the top and bottom plates are made out of acrylic, which tends to crack as well as the servo mounts deform over time when manufactured as 3D-printed parts, due to continuous mechanical load and heat generated by the servos.
Based on this experience, I am redesigning these critical components specifically for CNC manufacturing. This is not a direct material substitution, but a redesign adapted to machining constraints, tolerances, and load paths typical for CNC-milled metal parts (e.g. aluminum). The goal is to significantly improve thermal stability, and long-term reliability of the platform.

The resulting design is intended to serve as a durable, reusable development platform that can be shared for educational purposes within out studygroup and even beyond in the OpenSource and Maker/Hackerspace-World.
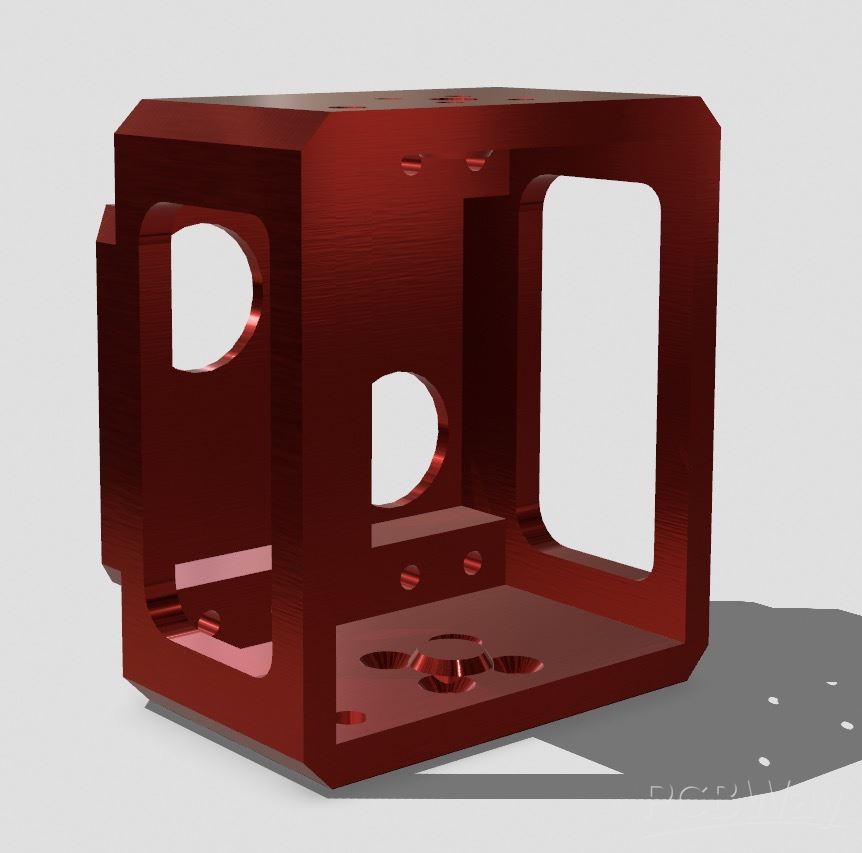
The final result will look like:

As a student, I unfortunately do not have the financial means to manufacture CNC-milled parts on my own and only own a cheap 3D-Printer. I am therefore reaching out to ask whether PCBWay would be interested in supporting this educational robotics project through CNC manufacturing services.
I believe this project aligns well with PCBWay’s strong support of students, makers, and open engineering projects. I would be very grateful for the opportunity to collaborate and openly talk about support and quality PCBWay has given me.
All the best,
Nico
- Comments(0)
- Likes(0)












