Aztro by Aztech Robotics I, II & III
Our project is developed by a group of three FIRST Tech Challenge (FTC) teams that have been competing since 2019:
Aztech Robotics I (17625), Aztech Robotics II (17626), and Aztech Robotics III (17627), all based at Plantel Azteca CDMX, Mexico.
For each competition season, this robot is developed three times—one for each team. Although each team builds its own robot, the design process is collaborative, combining the best knowledge, technical skills, and competitive experience contributed by every team. This approach allows us to continuously improve our designs while ensuring that all students gain hands-on experience in engineering, manufacturing, and problem-solving.
Season Challenge – DECODE by FIRST
The DECODE by FIRST challenge focuses on strategy, precision, and automation, requiring robots to identify, classify, and score different game elements accurately and efficiently. Teams must design mechanisms capable of handling, sorting, and launching game pieces, while also navigating the field quickly and reliably. The challenge encourages innovation in mechanical design, sensor integration, and autonomous decision-making.
How Does the Robot Work?
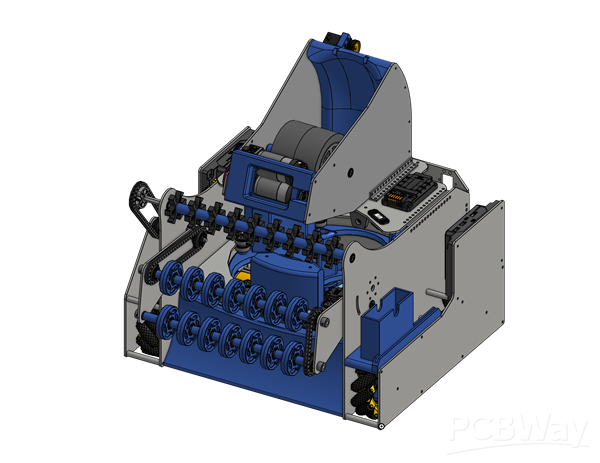
Our robot is designed to meet the demands of the DECODE challenge and is composed of five key mechanisms. Approximately 90% of the robot is manufactured by our teams, with only the electronics and wheels being commercially purchased.
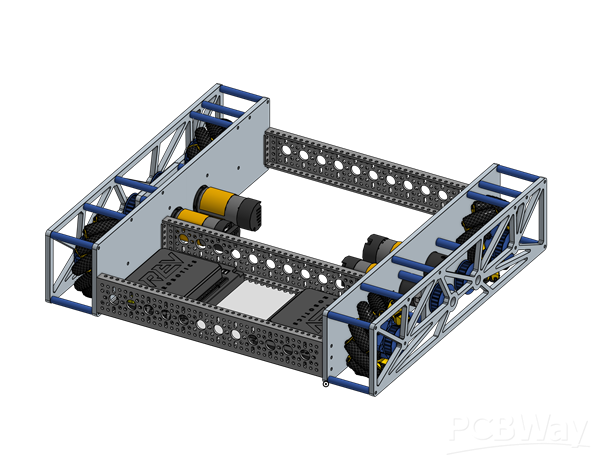
Drivetrain
The robot uses a four-wheel mecanum drivetrain, enabling omnidirectional movement. Power is transmitted through a pulley-based system, which improves precision by eliminating gear backlash, resulting in smooth and accurate motion across the field.
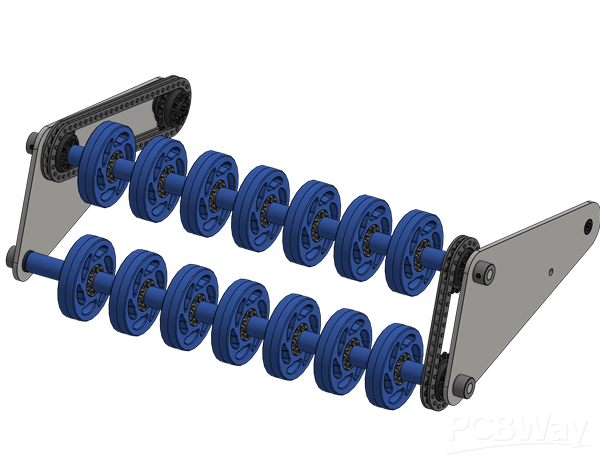
Intake System
The intake consists of three shafts:
The first is a fixed shaft driven by a chain connected to a REV Robotics HD Hex motor, equipped with goBILDA Gecko wheels that provide strong grip to securely hold the game element.
The second and third shafts form a pivot system, which allows the game element to enter the intake while preventing it from exiting unintentionally. These shafts use TPU-printed compliant wheels, enabling adjustable flexibility for better control of the game elements.
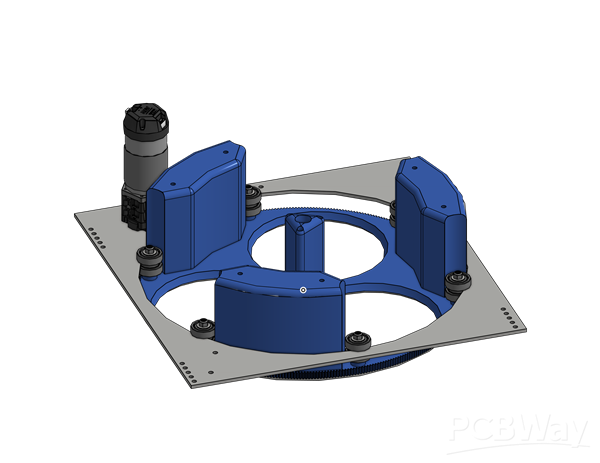
Spin Indexer
The spin indexer operates using color sensors and a REV HD Hex motor with a 15:1 reduction. Through a gear-driven connection to its base, the system rotates at the optimal speed required to quickly and accurately classify game elements.
Transfer System and Shooter System
The transfer mechanism uses four star-shaped compliant wheels, driven by pulleys and a servomotor. This system ensures a smooth and controlled transfer of the game element from the indexer to the shooter.
The shooter includes an adjustable hood, allowing us to modify the launch angle as needed to score from different positions on the field. The flywheel is powered by REV HD Hex motors with a 3:1 reduction, providing the necessary torque and speed for consistent and accurate shots. Additionally, the robot is equipped with a Limelight camera, enabling automatic alignment with the scoring zone.

- Comments(0)
- Likes(0)