PCBWay Community
Search title or content
Search
PCBWay
PCB Instant Quote
CNC | 3D Printing
Login
Sign Up
More Notifications
No notifications.
My Profile
My projects
My Likes
My Deals
My Goods for Bazaar
Settings
Sign Out
Projects
Categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
View all categories
By Source Files
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Tad Boy Color
SummerCart64 - a fully open source N64 flashcart
kv4p HT v1.7b
QuinLED-Dig-Uno
Bike Fingerprint - PCB
Arduino RC engine sound & light controller with inertia simulation for ESP32
Solar Powered WiFi Weather Station V2.0
Frog Boy Color
SIDKick pico 0.2 (SID 6581/8580-replacement for C64/C128)
View all source files projects
Featured Projects
Onju Voice - AI assistant replacement to Google Nest Mini by @justLV
LogicAnalyzer V6.0
DIY 1kW Open Source MPPT Solar Charge Controller
Featured
Source Files
Video
View all projects
Questions
Sponsorships
Feedback
Blog
Store
PCB Design
Contest
- 2026 KiCad PCB Design Contest
- 8th Project Design Contest
- 7th Project Design Contest
- KiCad Design Contest
- 6th Project Design Contest
- 5th PCB Design Contest
- 4th PCB Design Contest
- Raspberry Pi Pico Contest
- PCB Design Tutorial
- 3rd PCB Design Contest
- I CAN SOLDER Kit Contest
- 2nd PCB Design Contest
- 1st PCB Design Contest
Add questions
Create a project
Please verify your email address so that you can enjoy our more comprehensive services.
Wearables
Weather
All categories
DIY Electronics
Arduino
Hardware
Audio
Computers & USB
Breakout Board Projects
Home Automation
LED Displays & Matrices
IoT
Robotics
3D Printing
Blinkenlights
Calculator
Camera
Clocks
CNC
Educational
Automotive
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Keyboards
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Raspberry Pi
Radio
Retro Stuffs
Space & Satellite
Sensors
Software
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
Project by top creative fields
All categories
3D Printing
Arduino
Audio
Automotive
Blinkenlights
Breakout Board Projects
Calculator
Camera
Clocks
CNC
Computers & USB
DIY Electronics
Educational
Electronic Games
ESP32
Fabrication Tools
Flight
Guitar
Hardware
Home Automation
IoT
Keyboards
LED Displays & Matrices
Misc
Music
Nixie Tube
Oscilloscope
Particle
Power Supply
Programmable Logic Projects
Radio
Raspberry Pi
Retro Stuffs
Robotics
Sensors
Software
Space & Satellite
Synthesizer
Ultrasonic
Virtual Reality
Wearables
Weather
View all categories
Camera
Photographic equipment is a general term for cameras and their related accessories, various equipment and articles related to photographic activities.
All tags
Camera
Module
Wireless
Smart
Transmission
Create a project
Sort by : Trending
Trending
Score
Likes
Views
Discuss
Newest
Featured
Source Files
3D Design
Video
Mechanical anomaly detection is critical in autonomous manufacturing processes so as to prevent equipment failure, ameliorate the effects of expensive overhaul procedures on the production line, reduc...
Multi-Model AI-Based Mechanical Anomaly Detector w/ BLE
2065
4
1
Kutluhan Aktar
Kutluhan Aktar
TURKEY
14
82
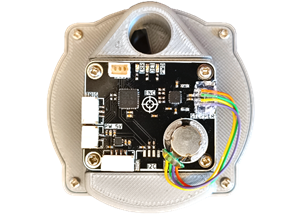
The Mini Optical Filter Wheel is a low-cost, compact device for switching between eight 8x8mm optical filters. It is designed around the use of small square filters, which are significantly more affor...
Mini Optical Filter Wheel
760
0
0
NotBlackMagic
NotBlackMagic
PORTUGAL
1
0
In 2025, car crashes resulted in an estimated 1.2 million deaths globally (1). Of the 1.6 billion vehicles in the world, it is estimated that only between 350 and 500 million vehicles have some form o...
A Low-Cost, LiDAR Car Collision Avoidance Solution
255
0
1
Corbin Hawkes
Corbin Hawkes
UNITED STATES OF AMERICA
0
2
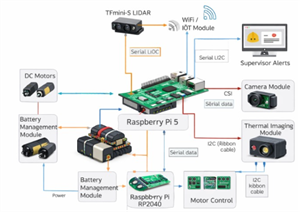
SafeTrack is a battery-powered autonomous AIoT rover designed to improve industrial safety by continuously patrolling factory floors and detecting unsafe conditions in real time.Industrial environment...
SmartTrack
709
0
2
Rajah S
Rajah S
INDIA
0
0
A thermal imager, also known as a thermal camera or infrared camera, is a device that captures and visualizes thermal or infrared radiation emitted by objects and surfaces. Today I received the ...
InfiRay Xinfrared P2 pro thermal camera detailed Review
3289
0
2
Mirko Pavleski
Mirko Pavleski
NORTH MACEDONIA
137
0
Capture photos with esp32-cam, SD card with motion detectionIn this exciting tutorial, we'll show you how to build your own security camera using an ESP32-CAM and an AM312 PIR sensor to detect motion....
Capture photos with esp32-cam, SD card with motion detection
5208
0
2
CarlosVolt Tutoriales
CarlosVolt Tutoriales
ARGENTINA
28
30
Простые парковочные радарыГлавнаяАвтоПростые парковочные радарыНиже на рис.1 приведена схема простого парковочного радара. Здесь в качестве сенсора применяется инфракрасный сенсор GP2Y0A02YK.&nbs...
Простые радары 1
1382
0
0
Yuray Yura
Yuray Yura
UKRAINE
76
31
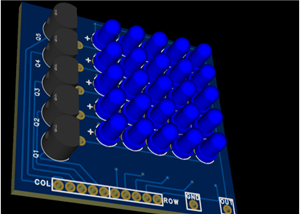
This 5x5 camera uses transistor logic to select which pixel to output the value of, all outputs are using the reverse bias techique to find the current produced by the LEDs, (very little) so there is ...
Camera 5x5 pixels
193
0
0
. Real Space Pro
. Real Space Pro
UNITED ARAB EMIRATES
2
0
I constantly broke my FPV drone ...yes I am not the best pilot ;-)So decided to Design a durable and ligth drone body that fits the PACO PICO.As Aluminium is a perfect material for the durabilty/weigh...
Camera Mount Pico1-Drone case v2
614
0
0
Mathieu Muller
Mathieu Muller
FRANCE
0
0
8 channels 5.8GHZ Audio-Video transmitter circuit based on TX5823 very simple and easy to solder. contains a voltage regulator built innote: by ordering any of my free project from pcbway y...
fpv audio-video 5.8GHZ vtx "transmitter" based on tx5823 with voltage regulator built in
5767
3
5
Ahmad shaaban
Ahmad shaaban
LEBANON
9
4
fpv audio-video 5.8GHZ rx receiver based on rx5808 8 channels note: by ordering any of my free project from pcbway you are supporting me to complete and publish my new project witch is an open so...
fpv audio-video 5.8GHZ rx receiver based on rx5808 8 channels
2557
1
2
Ahmad shaaban
Ahmad shaaban
LEBANON
9
4
A phone like device which can be a dev stack for multiple purposes.
DogeDevStack
645
0
0
Insecure Doge
Insecure Doge
VIETNAM
1
0