





Ultra Fuel-Effificient Autonomous Race Car
Who we are
DTU Roadrunners is a multidisciplinary student team composed of members from mechanical, electrical, and software engineering, along with other technical backgrounds. The team develops highly energy-efficient urban concept vehicles, with a strong focus on innovation, performance, and sustainability. Since 2005, DTU Roadrunners has consistently participated in the Shell Eco-marathon. In 2022, the team not only achieved first place in the Internal Combustion Engine (ICE) category but also got the podium for Autonomous Urban Concept as well. The team has also demonstrated strong performance in the AUC competition in 2018 and achieved a shared second place in 2019. Building on this legacy, the Autonomous team is once again formed to advance both hardware and software systems, with a focus on improving efficiency, robustness, and autonomous driving capabilities for upcoming competitions.

Autonomous Steering for DTU EcoCar
The DTU Roadrunners autonomous system is built on a modular and scalable architecture using ROS (Robot Operating System). The current software stack runs on ROS Noetic with Ubuntu 20.04 LTS, ensuring stability and compatibility with modern development tools. The system has been structured to support future transition to ROS2. To improve robustness and reproducibility, the software environment is containerized using Docker. Combined with a structured build system, this allows consistent deployment and testing across development environments. The system integrates multiple hardware interfaces, including steering and braking actuators, LiDAR, GPS, IMU, and embedded controllers. These components support perception, planning, and control modules designed to handle the challenges of autonomous driving in the competition environment.
Below is a video from of our autonomous rides:

Perception and Road Detection
Road detection is achieved using LiDAR-based analysis of surface properties. The system estimates surface roughness by analyzing the first derivative of distance measurements, while reflectivity data from the LiDAR is used to identify typical road characteristics such as smoothness and low reflectivity. By combining these features, the system achieves fast and reliable detection of the drivable area, enabling real-time navigation.
Path Planning and Navigation
Once the road and obstacles are identified, the system applies a Voronoi-based segmentation algorithm to generate a safe driving path. Non-drivable regions are segmented into clusters, and the algorithm computes a path that maximizes distance from obstacles. This results in a trajectory that keeps the vehicle centered on straight paths while optimizing cornering by selecting shorter, efficient routes through turns.
Parking System
Parking is performed using LiDAR-based detection of a reference object located behind the parking zone. A fitting algorithm identifies this object and generates a trajectory toward it. A control loop regulates the braking actuator to ensure smooth and consistent deceleration, allowing the vehicle to stop accurately within the designated parking area.
Onboard Computing
The autonomous system is deployed on a compact and energy-efficient onboard computer, providing sufficient processing power for real-time perception and control. The system is integrated within the vehicle structure to optimize space utilization while maintaining performance.
GPS Module
Although the autonomous car currently relies solely on local navigation, its dual-sensor Piksi Multi GPS system (which uses a fixed base station to provide centimeter-level positional accuracy) sets the stage for significant future improvements. While this accurate, RTK-corrected GPS data presently just refines local position estimates, it is the crucial foundation for a complementary optimal path algorithm based on a global track map. Providing the grounds for transitioning from the current local routing to this advanced global map algorithm in next year's competition, the team aims to fully leverage the vehicle's GPS capabilities to drastically improve both its autonomous lap times and overall mileage.
Ouster LiDAR with Integrated IMU:
This is an upgrade to the Velodyne Puck used previously by the team. It is a small high performance active exteroceptive sensor, with a power consumption of 24 V nominal and is capable of measuring the distance to objects, intensity & the reflectivity of the object. An array of 32 infra-red (IR) lasers paired with IR detectors spin within its fixed housing . It conducts a scan of its surroundings with a configurable maximum firing rate of 20000 times in a second thereby providing a real-time & detailed 3D point cloud. Thus, this sensor is heavily used for all the autonomous driving challenges placed at 1.5m from the front of the car.

Safety System
Safety remains a top priority in the vehicle design. The system includes a latching emergency stop button located within the driver’s reach, which immediately disables propulsion and actuator systems. The steering system is equipped with a mechanical override mechanism, allowing the driver to take control if necessary. Similarly, the braking actuator is designed with a disengagement mechanism to ensure manual intervention is always possible. Additionally, the vehicle includes an onboard audio feedback system that provides realtime status updates and alerts, enabling the driver to respond quickly to any issues without distraction.
Technical specifications
Actuation
We’re using a Nema23-82 stepper motor paired with a 16:1 planetary gearbox.
Performance
This setup gives us a maximum torque of 22.4 Kg/cm and can hit speeds of 500 RPM.
We are transitioning from bulky "off-the-shelf" controllers to a custom, integrated PCB to save weight and space. High-quality manufacturing is essential for:
Signal Integrity
We need to ensure we get perfectly clean data from our high-resolution encoder to the controller. Our new board integrates an MCP2562 CAN-transceiver for bus communication and an MPU-9250 9-axis IMU for tracking orientation. Both require very precise trace routing to keep the signal quality high and error-free.
Power Distribution
Managing the 6A current requirement of the Nema23 motor while keeping the board small enough to fit our steering assembly is a challenge. The design uses a TOS_06-12SIL DC-DC converter along with WE-SL2 common-mode filters and shielded inductors to kill EMI and keep the power delivery stable.
Reliability & Integration
Since steering is a mission-critical system, we can't afford a failure, so we need industrial-grade manufacturing to stay safe during our autonomous tests. This custom PCB acts as the main interface for our NVIDIA Jetson unit. By using 0805/1206 SMD components and Molex Micro-Fit 3.0 connectors, we’ve created a lightweight, vibration-resistant setup that is truly race-ready.
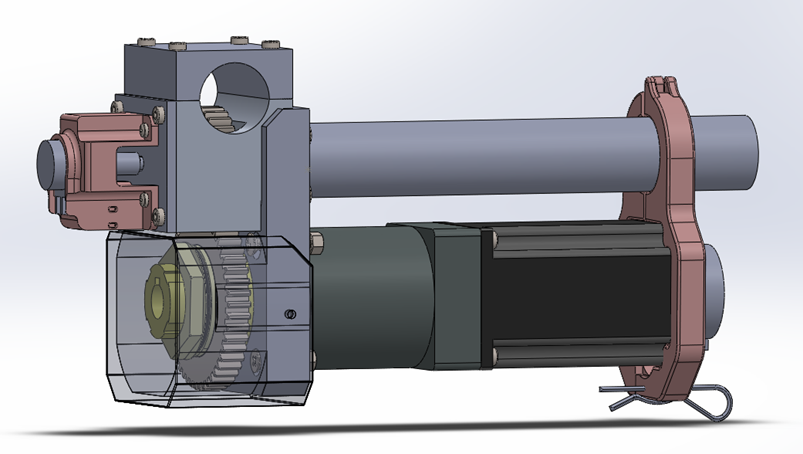
Mechanical Integration
We’ve designed a custom motor holder that integrates directly with the steering column. It features specialized gear covers and mounts for potentiometers to give us redundant position sensing for safety.
Please find our attached zip file with the relevant data for the PCB.
Thank you PCBWay!
Thank you for your attention! We’re excited to potentially partner with you for the 2026 season, where we are hoping for another victory!

Kind Regards,
DTU Roadrunners
- Comments(0)
- Likes(2)












