TEAM RICHMOND , MEGA SUMO BOT, MINI SUMO BOT
Team Richmond,
Team Richmond was formed around three years ago, during our freshman year at university, when five friends came together to bring more creativity into engineering. Our team consists of two electrical engineers, one software engineer, and two mechanical engineer. We believe that by combining our different fields of expertise, we can design and build almost anything.

In the early semesters of our studies, much of our work was heavily theoretical. Wanting a more practical understanding of engineering, we decided to challenge ourselves in a different way. With little prior experience, we began participating in various robotics competitions. Through these experiences, we gradually built both our technical skills and our confidence. Our progress is reflected in our results, particularly in sumo robotics competitions, where we have achieved 1st, 2nd, and 3rd place finishes across various events.
here is our previous championship video :
Today, Team Richmond has become more than just a robotics group for us. It represents the foundation of something bigger. We aspire to create a community of like-minded individuals and share the knowledge we have gained. We plan to do this through social media workshops, and lectures, building on the community we have already started to grow.
Our progress is reflected in our results, particularly in sumo robotics competitions, where we have achieved 1st, 2nd, and 3rd place finishes across various events.
Following our previous success, we are currently preparing for this year’s main event: a sumo robot championship hosted by the Georgian Robotics Association. The competition follows standard sumo rules, where two robots face off on a circular ring, and the objective is to push the opponent out of the arena. The first robot to leave the ring loses.
For this project, we chose to develop two robots in different categories: a standard 20×20 cm robot (up to 3 kg) and a mini 10×10 cm robot (up to 500 g), allowing us to explore different design approaches and maximize our competitive potential.
he following sections outline each robot and its design in more detail:
Standard RoboSumo
Despite working with limited resources, we have made strong progress. So far, we have gathered essential components, developed the theoretical foundation, and created initial CAD designs for our robot. We are also in the process of designing our custom PCB, which will be a key part of the system.
Our build is divided into two main parts: the mechanical system (gears and motors) and the custom electronics.
Custom PCB and Electronics
Our robot is powered by a Teensy microcontroller and integrates multiple sensors, including five IR distance sensors, three ToF sensors, a gyroscope, and additional 4 infrared sensors for surface and edge detection as well as a driver for our motors and a start module (required).
Since we are working with a single microcontroller and do not have a backup, one of our main priorities is ensuring safe and stable power management. Our sensors operate at 5V, while the microcontroller operates at 3.3V, making proper voltage regulation and signal level handling critical. We understand the importance of proper PCB design practices, such as separating high-current motor traces from sensitive sensor lines, optimizing trace widths, and organizing the layout into functional sections.
Additionally, the competition requires a dedicated start module and an emergency kill switch, both of which will be integrated directly into the PCB design.
As this is one of our first fully custom PCB projects, feedback and support from experienced engineers would be extremely valuable in helping us refine and optimize our design.
As part of our ongoing development, we are also exploring the transition from analog Sharp distance sensors to digital distance sensors for improved accuracy and faster response times. While this upgrade would enhance overall system performance, current resource constraints require us to carefully evaluate and prioritize components.
To address this, we are also considering in-house solutions and alternative implementations, however, these approaches introduce additional design complexity.
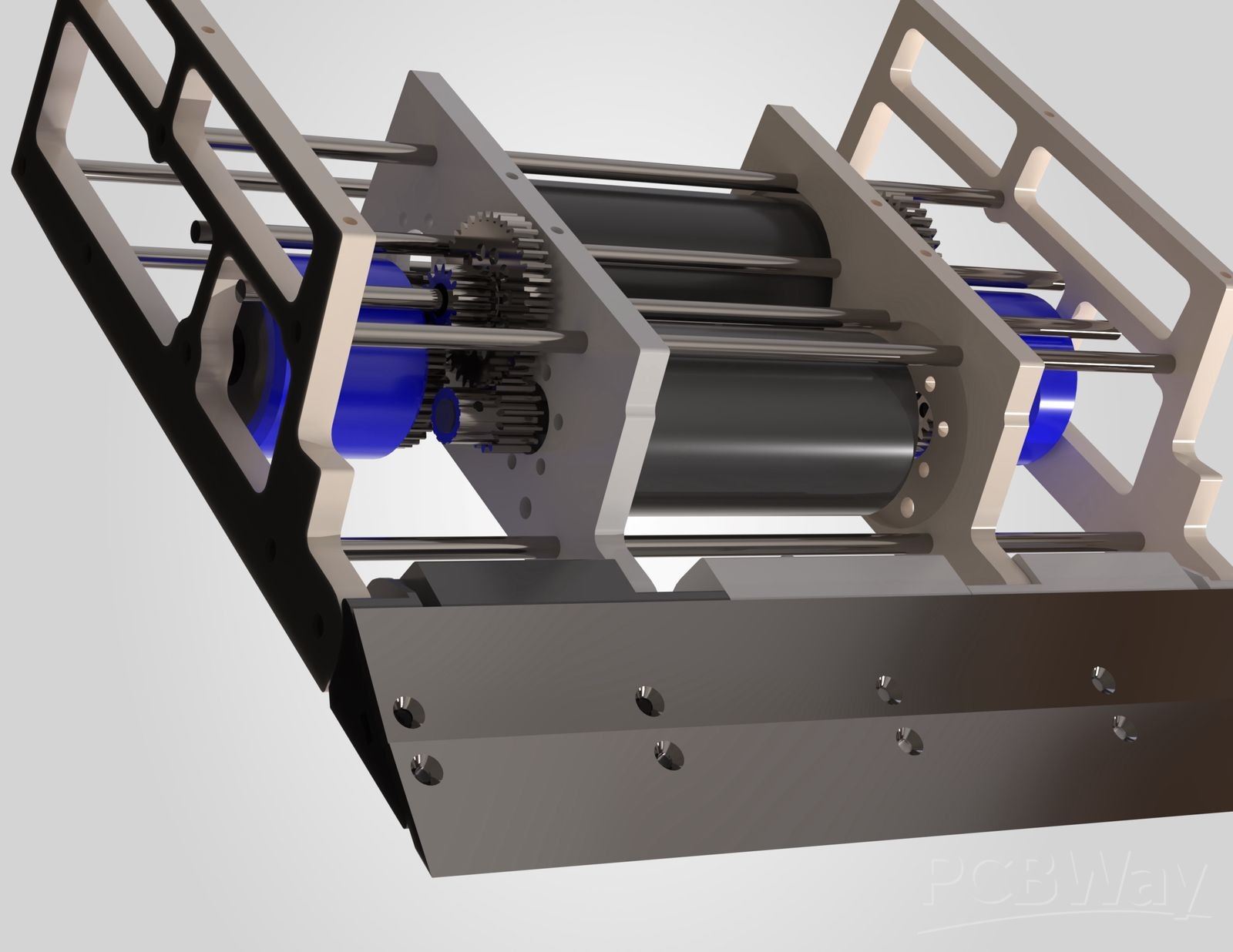
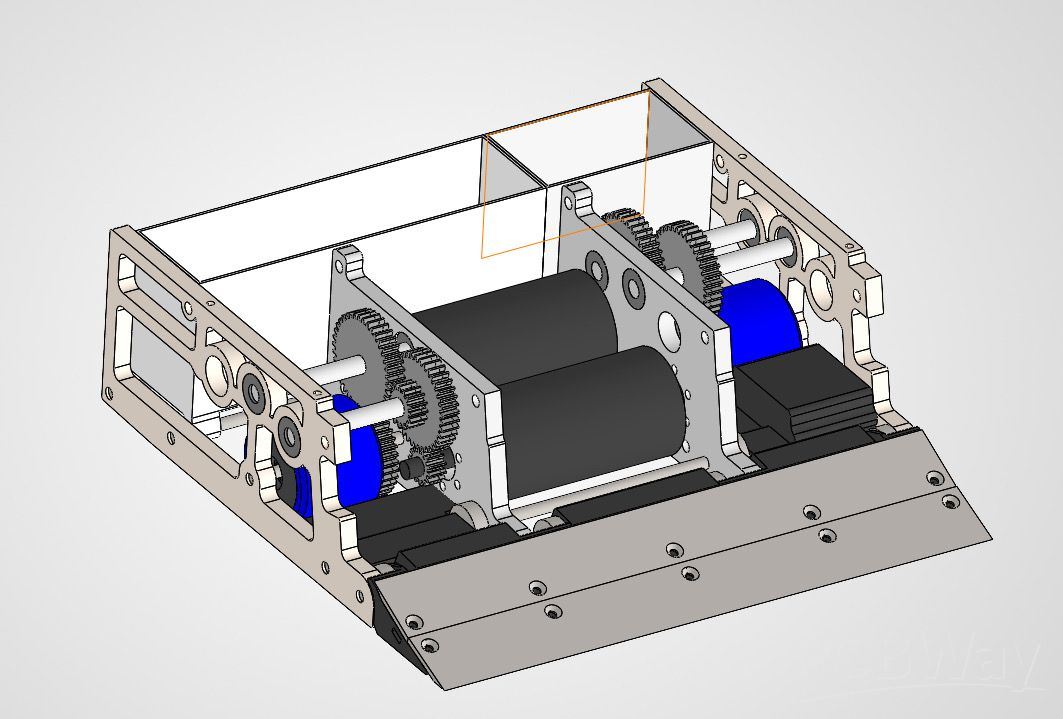
Mechanical System – Gears, Motors and wheels
The mechanical design focuses on achieving high torque, fast response, and strong stability within the ring. This involves developing an efficient gear reduction system, selecting appropriate motors, and optimizing weight distribution for maximum pushing performance.
We have designed a gear reduction system that lowers the motor speed from approximately 7000 RPM to around 1000 RPM, while increasing torque to approximately 3 Nm. Additionally, we plan to use magnets mounted at the base of the robot to increase downforce, significantly improving traction as well as pushing capability.
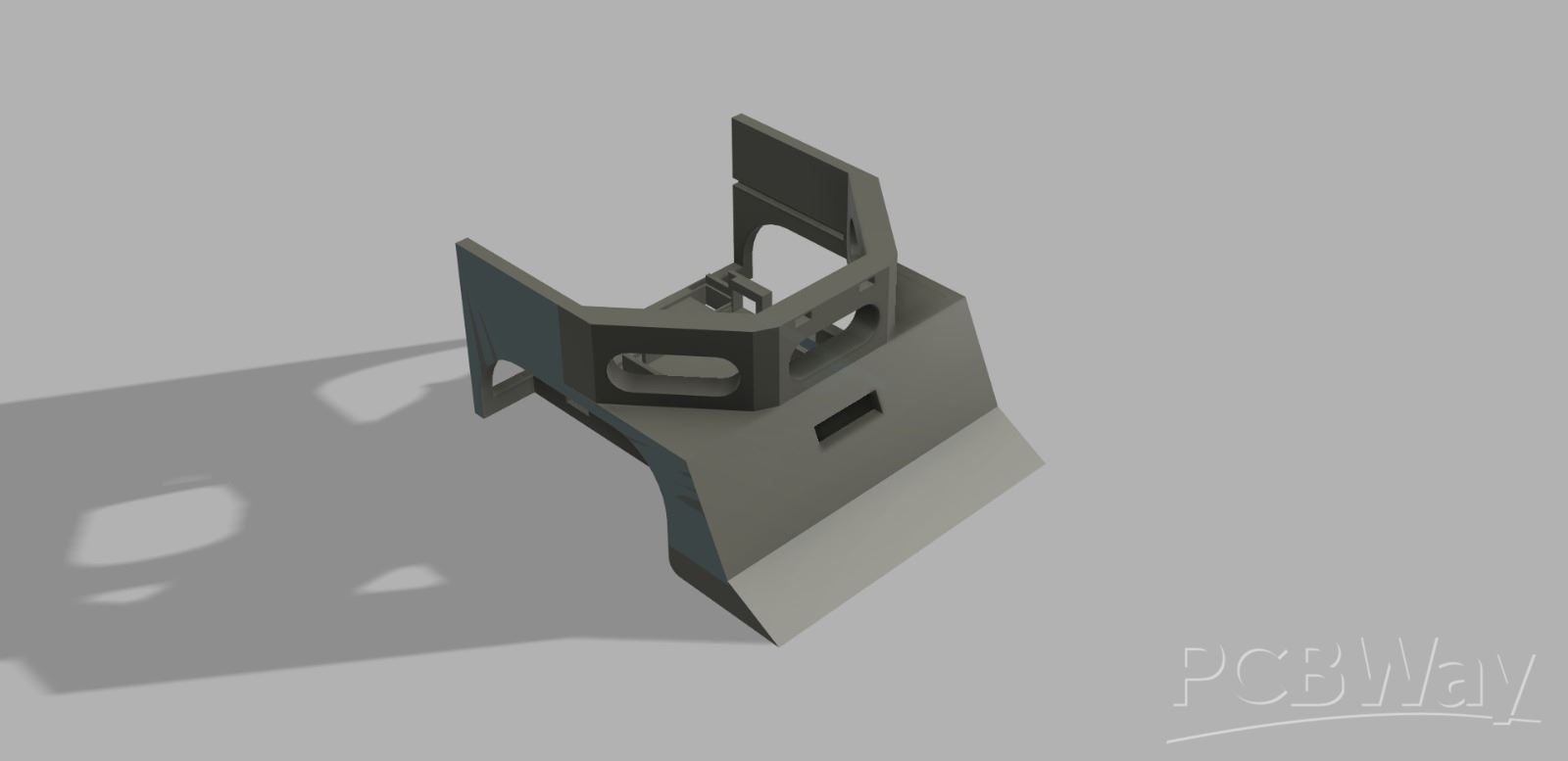
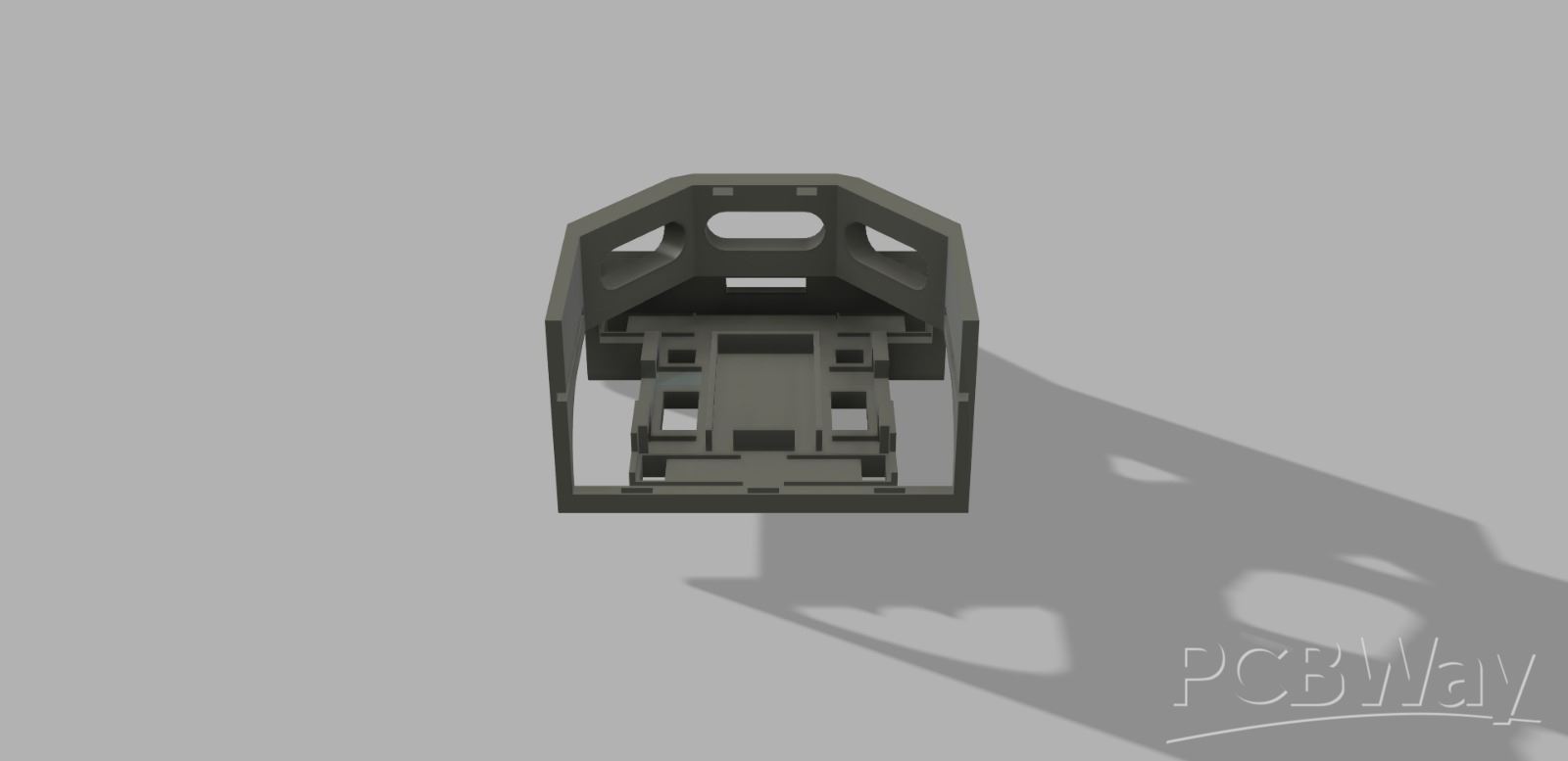
The chassis is designed to allow flexibility in sensor placement, featuring an open front structure that enables testing and optimization of different configurations. Internally, we plan to use 3D-printed dividers to keep components organized and properly separated. The electronics will be mounted on an elevated platform, with mounting for the PCB to prevent any movement during operation.
Wheel traction is another critical factor. Based on our experience, commercially available silicone wheels do not provide optimal performance. Therefore, we plan to design custom wheels: aluminum wheel hubs for strength, combined with 3D printed molds to create smooth, high quality silicone tires. This approach will allow us to fine-tune grip. maximize performance in competition.
We have already begun developing CAD models for the chassis, wheels, and overall structure, and we are continuously refining the design to improve reliability and competitiveness.
(Temur Makharadze our mechanical engineer was the one who desinged this cad model)
Mini RoboSumo
For the Mini Sumo category, our team is building upon a robot developed in previous competitions. Rather than starting from scratch, we chose to refine and scale down a design that has already proven effective. By redesigning it within the 10×10 cm constraints, we aim to significantly improve its performance using the experience we have previously gained.
One of the key improvements is in the sensing system. The previous robot relied on three ultrasonic sensors for opponent detection, however, these sensors have relatively slow response times (on the order of tens of milliseconds per reading), making them less suitable for fast paced combat. In the new design, we are transitioning to a more advanced sensor fusion approach similar to our standard robot.
The updated system will be powered by an Arduino Nano and will include:
Four IR sensors on the bottom for edge detection
Three front-facing Sharp distance sensors for primary opponent detection
VL53L0X Time-of-Flight Sensor modules for distance measurement
Two additional side distance sensors for spatial awareness
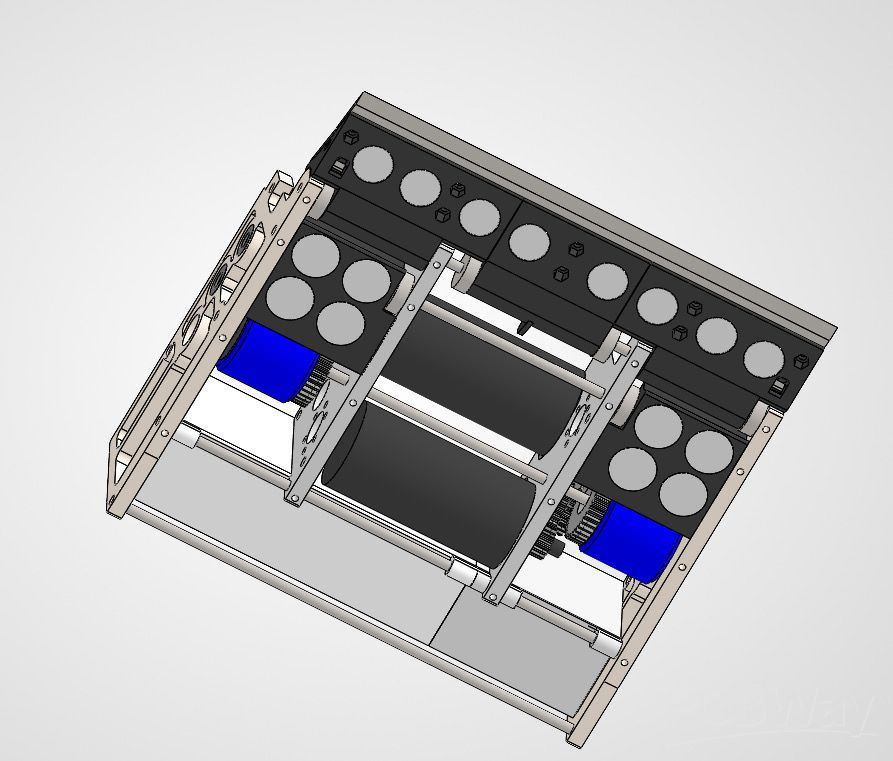
Mechanically, the robot will retain a similar structure to the previous design, with a fully 3D-printed chassis optimized for compactness and weight constraints.(only 500 grams) As with our standard robot, we are upgrading the wheel system by designing custom wheels using 3 d printed hubs and casting silicone tires to achieve better traction and control.
This approach allows us to preserve the strengths of our previous design while systematically improving its weaknesses, resulting in a more competitive and refined Mini Sumo robot.
our previous sumo robot build
(3D model was designed by our mechanical engineer Elene Gviniashvili)
Support from PCBWay would make a big difference for our team. As students, producing reliable PCBs and mechanical parts while working with very little resources is challenging. Access to high-quality PCB manufacturing, prototyping, and CNC services would help us significantly improve our designs and overall performance.
We would also greatly value any advice or feedback on our design, as it would help us grow and refine our engineering approach.
In return, we will actively share our progress through social media and future community projects, providing visibility to PCBWay and highlighting their role in our development.
As part of our partnership, we will actively promote your support by featuring it across our social media platforms and YouTube content, where we document our development process and competition journey.
- Comments(0)
- Likes(1)