Smart Robotics Motor Control Board
Smart Robotics Motor Control Board for ESP32-CAM Systems
Project Overview
This project is a custom-designed robotics motor control PCB developed as part of my Bachelor's graduation project in Embedded Systems and Electronics Engineering.
The goal of this project is to create a compact and efficient robotics control platform that simplifies wiring, improves hardware integration, and enhances overall system reliability for smart robotic applications.
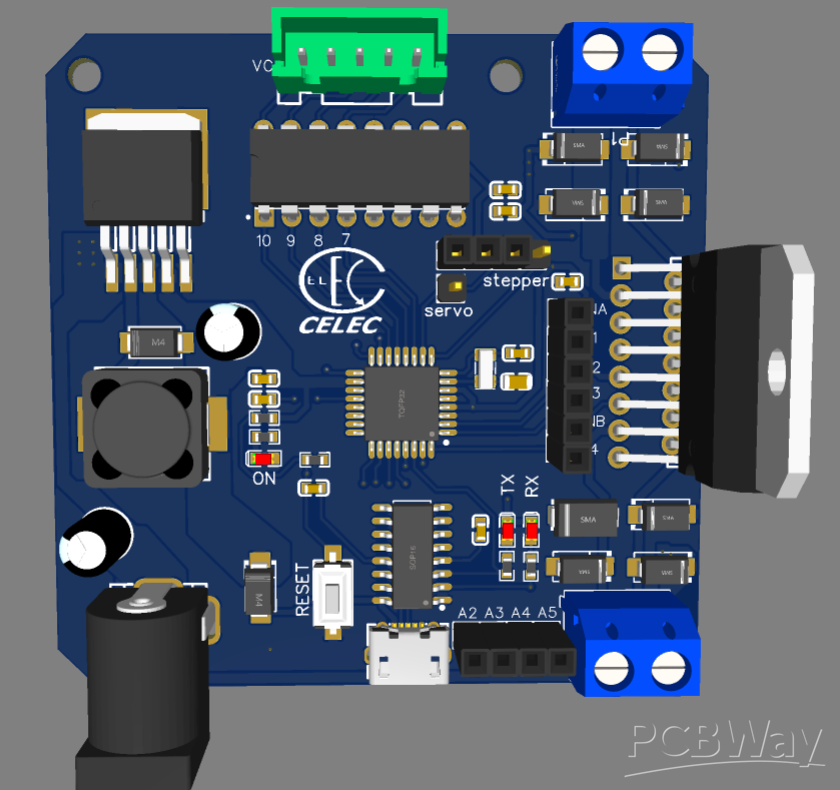
The PCB is specifically designed to work with an external ESP32-CAM module, which provides wireless communication and real-time camera streaming capabilities. The custom control board acts as the main hardware interface and motor control unit.
An onboard ATmega328P microcontroller communicates with the ESP32-CAM through UART serial communication and handles all real-time motor and peripheral control operations.
Main Features
_External ESP32-CAM module support
_ATmega328P onboard microcontroller
_Integrated CH340 USB-to-Serial programming interface
_Micro-USB direct programming support
_Control of 4 DC motors using onboard motor driver
_Stepper motor control using ULN2003 driver
_Servo motor interface
_TX/RX communication status LEDs
_Optimized power management and voltage regulation
_Compact and organized PCB layout for robotics applications
System Architecture
The system is divided into two main processing units:
_ESP32-CAM Module Responsibilities
Wireless communication
Camera streaming
High-level command processing
Remote monitoring and control
_ATmega328P Responsibilities
DC motor control
Stepper motor control
Servo motor management
Real-time hardware processing
Peripheral interfacing
Communication between both controllers is implemented through UART serial communication for reliable and efficient data exchange.
_Motor Control Capabilities
The PCB supports multiple actuator types, making it suitable for advanced robotics systems:
Four DC motors through onboard motor driver circuitry
One stepper motor using ULN2003 driver
One servo motor interface
This flexible configuration allows the board to be used in various robotics and automation projects.
_USB Programming Interface
The board includes an onboard CH340 USB-to-Serial interface, enabling direct programming of the ATmega328P through Micro-USB without requiring any external programmer.
This significantly simplifies development, testing, and debugging.
Applications
This PCB can be used in:
_Smart robotics platforms
_Autonomous vehicles
_Surveillance robots
_Automation systems
_Educational embedded systems projects
_IoT robotics applications
Design Goals
The main objective of this PCB is to:
_Reduce wiring complexity
_Improve system stability
_Create a cleaner and more professional robotics platform
_Simplify future development and expansion
_Integrate multiple robotics control functions into a single compact board
Design Software
The schematic and PCB layout were designed using EasyEDA.
Technologies Used
_ATmega328P
_ESP32-CAM
_ULN2003
_L298N Motor Driver
_CH340 USB Interface
_EasyEDA PCB Design
Project Purpose
This PCB is an important part of my Bachelor's graduation project and will be used for further development, testing, and improvement of the robotics system.
PCBWay sponsorship and PCB manufacturing support would greatly help me continue developing the project, improve hardware quality, and build a fully functional prototype for real-world robotics applications.
I sincerely appreciate PCBWay's support for students, makers, and engineering projects.
Apply for sponsorship >>- Comments(0)
- Likes(0)