Rescue Rover X1
PROJECT DESCRIPTION
Rescue Rover X1 – A low-cost search & rescue robot for disaster environments
Rescue Rover X1 is a compact robotic platform designed to assist in search and rescue operations in dangerous environments such as collapsed buildings, earthquake zones, fire-damaged structures, or unstable industrial areas.
The main purpose of this project is to provide first responders with early visual and environmental information from inside hazardous zones where human entry is too risky.
The system is being developed as a low-cost, modular robotics platform that combines mobility, sensing, and remote monitoring in a single unit.
PROJECT MOTIVATION
The idea for this project comes from the need to improve safety and efficiency in emergency response situations. Many rescue operations require teams to enter unstable structures without knowing the internal conditions.
By developing a small, remotely controlled robotic system, the goal is to reduce risk for human rescuers and provide better situational awareness before physical entry.
This project is also part of my personal development as a student engineer. After achieving 6th place at the national stage of ONCS (Romanian National Science Competition), I decided to build a more advanced engineering system with real-world application in robotics and disaster response.
SYSTEM OVERVIEW
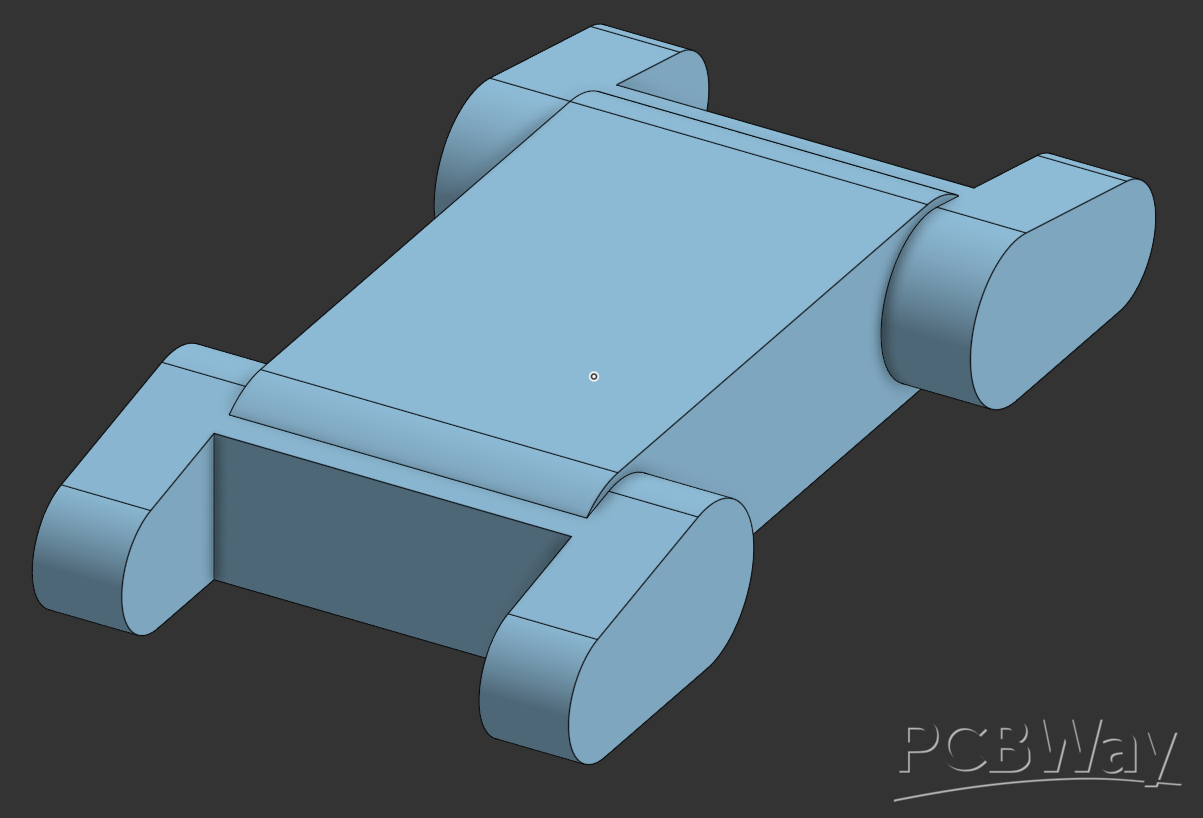
Rescue Rover X1 is based on a tracked mobile platform capable of navigating uneven terrain and debris.
The system includes:
Mobility System
A dual-motor tracked drivetrain designed for high torque and obstacle traversal in collapsed or irregular environments.
Control System
Remote wireless control with real-time feedback from onboard sensors and camera system.
Vision System
A front-facing camera used for live video transmission to the operator for navigation and exploration.
Environmental Sensing
Sensors for temperature, air quality, and gas detection (such as CO and CO₂ levels) to assess whether an environment may be safe for human presence.
Mapping System (future integration)
A mapping module designed to create a simplified spatial representation of explored environments to assist navigation and return path planning.
ELECTRONICS AND DEVELOPMENT APPROACH
The system is being developed in a modular way, allowing gradual integration of mechanical, electronic, and software components.
Custom electronics and PCBs will be required for:
motor control and power distribution;
sensor integration;
stable communication between modules;
improved reliability compared to breadboard prototyping.
3D-printed structural components are used for rapid prototyping and mechanical iteration, allowing fast design improvements during testing.
DEVELOPMENT STATUS
The project is currently in the early development stage. The mechanical design and system architecture have been almost finished, and the next step is building the first functional prototype.
Funding and manufacturing support are required to begin full-scale prototyping, component integration, and testing.
PERSONAL CONTEXT
I am a high school student passionate about robotics, electronics, and engineering systems. I document my projects on my YouTube channel:
https://www.youtube.com/@Garage_Builds
The channel features engineering projects from multiple domains including robotics, mechanics, electronics, and prototyping. It currently has around 500 subscribers, with some videos reaching over 11,000 views.
Previous projects include complex builds such as a functional exoskeleton system, which helped develop my experience in mechanical design and system integration.
PCBWAY SUPPORT
PCBWay support would significantly help in transforming this concept into a functional prototype.
At this stage, the main challenge is obtaining resources to start building the first working version of the system. Support would directly contribute to:
initial prototyping of the robotic platform;
development of custom PCBs for electronics integration;
improving system reliability and structure;
accelerating development time and testing.
PCBWay would be featured as a development partner throughout the project, including documentation on YouTube and future updates during the build process.
- Comments(0)
- Likes(0)