Navi "YUTPA" Autonomous Surface Vehicle
Hello! We are Navi USV Team, a student engineering team founded at Bahçeşehir University Türkiye with the goal of developing autonomous unmanned surface vehicles for demanding maritime missions and international competitions. Since the day we were established, we have brought together students from different engineering disciplines around a common purpose: to design, build, and improve a fully integrated autonomous marine platform. Our team combines mechanical design, embedded electronics, power systems, sensor integration, and autonomy software, allowing us to approach every challenge as a complete engineering problem rather than as separate individual tasks.
For us, Navi is not only a competition team but also a long-term learning and development platform. Our main aim is to transform theoretical knowledge into real engineering experience through hands-on work in design, manufacturing, testing, analysis, and field validation. Every season, we work to improve not only our vehicle but also our technical depth, teamwork culture, and problem-solving capability. By developing our own systems and testing them in real conditions, we gain practical experience in autonomous navigation, perception, control, electronics, and system integration.
Over time, we have grown into a highly motivated and multidisciplinary team focused on advancing autonomous maritime technologies in Türkiye. We continuously improve our vehicle through iteration, technical analysis, and real-world testing, while also preparing ourselves for national and international competitions where performance, reliability, and innovation are equally important. Through this journey, we aim to represent our university successfully, contribute to the development of future engineers, and build increasingly capable autonomous surface vehicles that reflect our ambition, discipline, and passion for engineering.
Since our founding, we have consistently worked on electronic board design and development as one of the core parts of our engineering efforts. This year, we aim to take our vehicle further by significantly improving its electronic infrastructure and overall system reliability. In line with this goal, we are actively carrying out studies focused on more advanced, more integrated, and more robust electronic solutions for our platform. By building on the experience we have gained over the years in electronic card design, we are working to develop a more capable system that will better meet the demands of autonomous maritime operations and competition conditions.
Competition Experience and Achivements
Competition experience is one of the clearest indicators that Navi USV is not just a conceptual student project, but a real engineering effort that has been tested, challenged, and continuously improved in demanding environments. Over time, our team has had the opportunity to validate its work under the pressure of real competition conditions, where technical performance, reliability, teamwork, and fast decision-making are equally important. These experiences have played a major role in shaping our development process, because every competition has provided us with valuable feedback about the strengths of our system as well as the areas that required further improvement. Rather than treating competitions as isolated events, we see them as critical milestones that guide our technical evolution from one season to the next.

One of the most important examples of this was our participation in the Njord Autonomous Ship Challenge, where Navi USV achieved 4th place overall. This result was especially meaningful for us because it demonstrated that our vehicle and our engineering approach were competitive at an international level. Competing in such an environment required us to address not only autonomous mission performance, but also platform reliability, system integration, and real-time problem solving under strict operational conditions. The experience we gained at Njord significantly influenced our later design decisions and gave us a clearer understanding of how to build a more capable and competition-ready autonomous surface vehicle.
In addition to our international competition experience, our team has also gained recognition within the TEKNOFEST ecosystem, which reflects both our technical visibility and our long-term continuity in autonomous vehicle development. Our work in TEKNOFEST has strengthened our experience in project management, subsystem integration, and competition-focused engineering development, while also motivating us to pursue more original and robust solutions each year. These achievements are important to us not only because of the results themselves, but because they show that Navi USV has already established a proven development path. Today, we continue to build on this experience with the aim of creating a stronger vehicle, a more advanced electronic infrastructure, and a more mature engineering system for future competitions.
Our Vehicle "YUTPA"
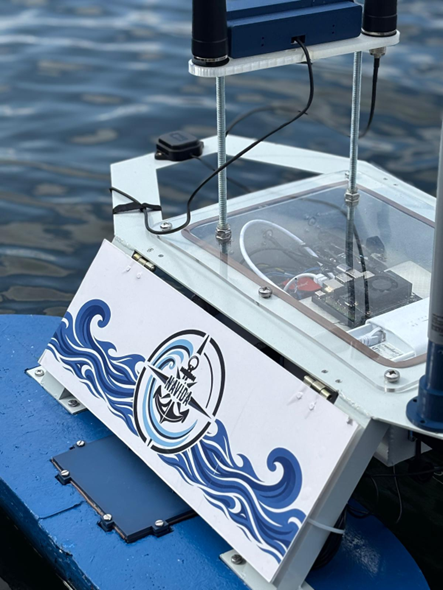
YUTPA is one of our current USV that we are working on. Technically, YUTPA can be summarized in three main parts: mechanical design, electronics, and software. Mechanically, it is a catamaran-type unmanned surface vehicle designed for stability, maneuverability, and mission performance in maritime conditions. The hull was modeled in SolidWorks, analyzed in ANSYS, and manufactured using composite materials to achieve a lightweight yet durable structure. It also includes dedicated mechanical solutions such as an aluminum electronics enclosure and motor brackets.
Electronically, the vehicle is built around a distributed architecture that supports sensing, control, communication, and power management. Its system includes components such as GNSS, stereo vision, lidar, a flight controller, telemetry, and onboard computing. A custom power distribution board was developed to provide the required voltage lines and improve reliability, monitoring, and integration compared to off-the-shelf solutions.
On the software side, YUTPA uses a ROS2-based autonomy architecture supported by Ardupilot and computer vision tools. Its software stack covers perception, path planning, path following, and control. Object detection, navigation, and mission execution are handled through integrated algorithms, allowing the vehicle to operate autonomously during competition tasks.

Marine vehicles create different constraints than standard hobby systems. High current, limited enclosure space, wiring complexity, vibration, and the need for clean maintenance all make generic off-the-shelf solutions less attractive as the vehicle matures.
For Navi USV, custom ESC board would reduce wiring complexity, improve packaging inside the enclosure, and create a safer, more repeatable electrical architecture for propulsion and onboard power distribution.
This matters because propulsion reliability directly affects mission reliability. Stable power delivery is essential not only for the motors, but also for sensing, compute, and communications subsystems.
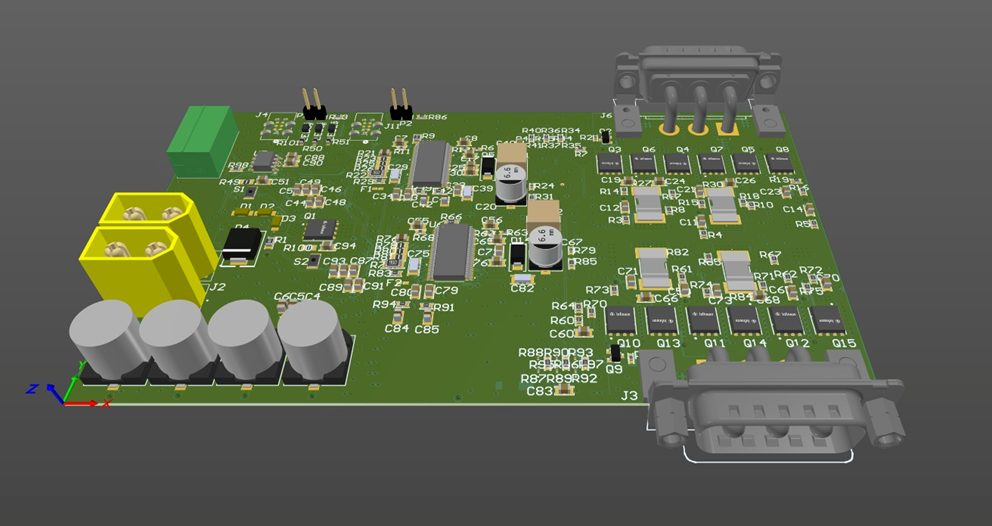
PCB Board Designed for YUTPA
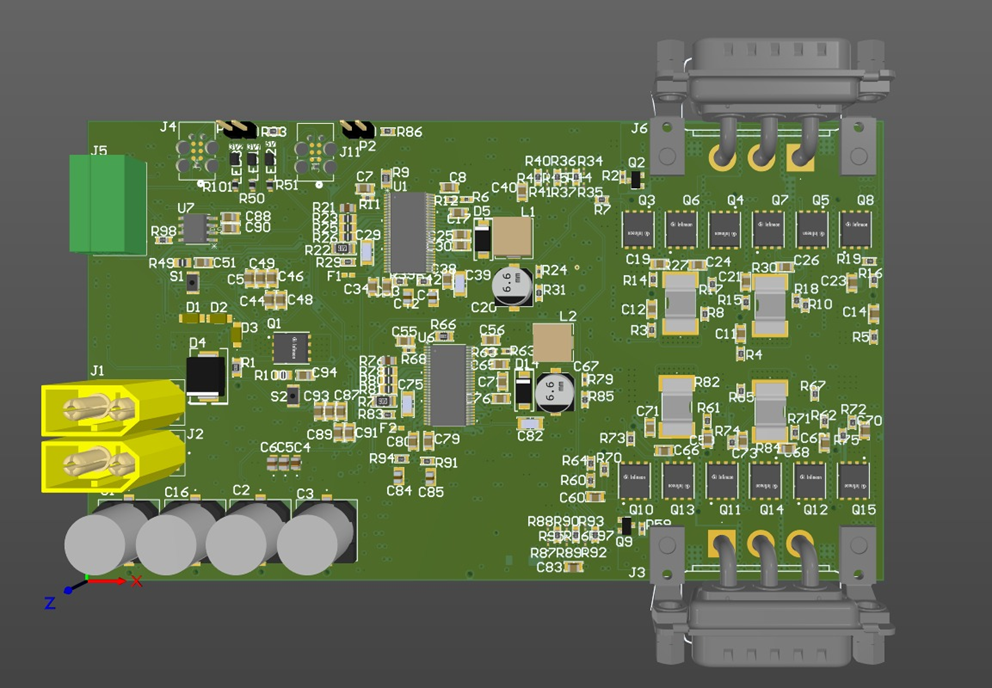
The ESC is one of the most important parts of our vehicle’s propulsion architecture, as it is directly responsible for controlling the underwater thrusters that generate both motion and maneuverability. Our unmanned surface vehicle uses a twin-thruster configuration, where steering is achieved through differential thrust instead of a conventional rudder. Because of this, the ESC is not simply a supporting component; it is a core subsystem that has a direct impact on thrust control, turning response, navigation accuracy, and overall mission reliability. The quality and stability of the propulsion control system play a major role in how effectively the vehicle can perform in real maritime conditions.
To meet these demands, we are developing a custom dual-channel ESC specifically tailored to our platform. Rather than relying on standard off-the-shelf solutions, we chose to design our own controller because our vehicle requires a more integrated, robust, and high-current-capable architecture. Commercial ESCs may be sufficient for general-purpose applications, but in an autonomous marine vehicle operating under competition conditions, propulsion electronics must offer much more than basic motor actuation. They must support continuous and reliable operation, simplify system integration, reduce wiring complexity, and fit cleanly into the overall electronic design of the vehicle.
One of the key advantages of our approach is the integration of two motor control channels on a single board. Since the vehicle uses two underwater thrusters, combining both control units into one compact ESC design helps us create a cleaner and more organized electronic system. This reduces the number of separate components, simplifies cable management, improves maintainability, and allows a more compact enclosure design. In marine robotics, where space, accessibility, and reliability are all critical, this level of integration provides a major engineering advantage.
The power stage of the ESC is being designed in accordance with the maximum current requirements of the propulsion motors. This is especially important because the thrusters are the primary force-generating elements of the vehicle, and the controller must be able to handle demanding operating conditions safely and efficiently. By selecting the power-stage components according to the electrical demands of the motors, we aim to ensure stable performance, better thermal behavior, and reliable thrust output throughout the mission. This design philosophy helps us build a propulsion control system that is not only functional, but also suitable for repeated use in challenging real-world conditions.
Another important reason for developing a custom ESC is the level of system compatibility it offers. Our vehicle is a multidisciplinary platform that combines onboard computing, sensing, communication, and autonomous control. In such a system, propulsion electronics must work as part of a larger integrated architecture. The ESC acts as the hardware layer that translates control decisions into real motion on the water. It connects the vehicle’s power system to its propulsion output and enables the thrusters to respond precisely to mission commands. As a result, the ESC becomes a direct enabler of autonomous performance rather than just an isolated motor driver.
From a broader engineering perspective, this custom ESC project also reflects our development philosophy as a team. We aim to move beyond simple assembly of ready-made components and instead design critical subsystems that are optimized for our own vehicle. By doing so, we improve performance, gain deeper technical knowledge, and create a more original and capable platform. The ESC is therefore not only a propulsion component, but also an important step toward a more advanced, reliable, and competition-ready electrical architecture for our unmanned surface vehicle.
In summary, our custom dual-channel ESC is being developed as a compact, high-current, and integrated propulsion control solution for our autonomous surface vehicle. By combining two thruster controllers on a single board and designing the system specifically around our vehicle’s operational requirements, we aim to achieve improved reliability, cleaner integration, and stronger overall performance. This makes the ESC a central element of our effort to build a more capable and professionally engineered autonomous marine platform.
Circuit Analysis and Simulation Approach
The ESC schematic blocks will be analyzed using LTspice and PSpice. These tools were selected because they provide a practical and accessible environment for validating circuit behavior before hardware production.
Simulation results will be used to verify whether the board-level circuits and integrated devices operate as intended, helping the team reduce design risk before fabrication and assembly.
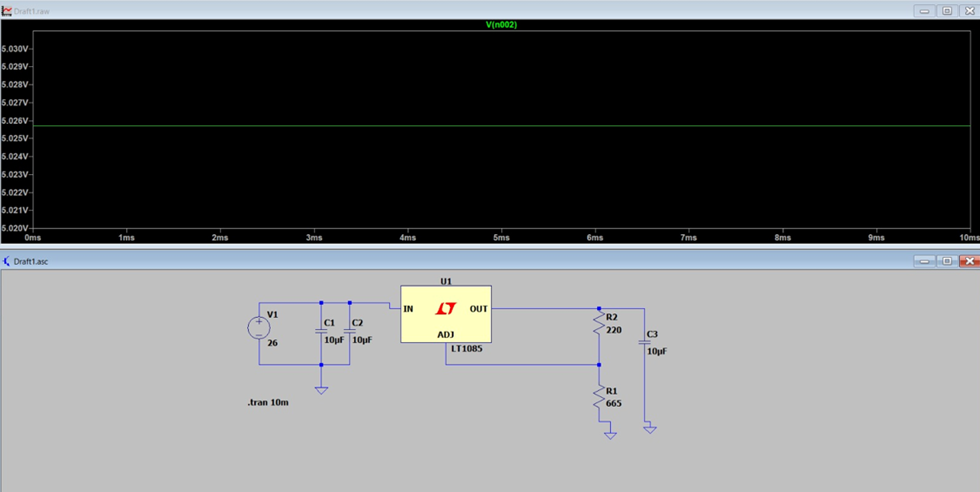
The schematic represents an adjustable LT1085 regulator stage that reduces a 26 V input to approximately 5 V through a resistor divider. The corresponding waveform confirms the regulated output level.
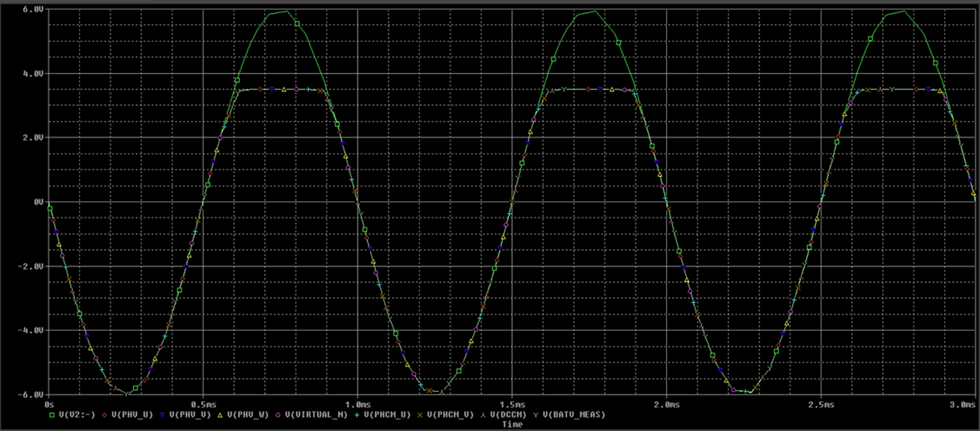
The graph shows a sinusoidal signal being clamped to the 3.3 V level by a protection diode, preventing the microcontroller input from being exposed to a damaging overvoltage condition.
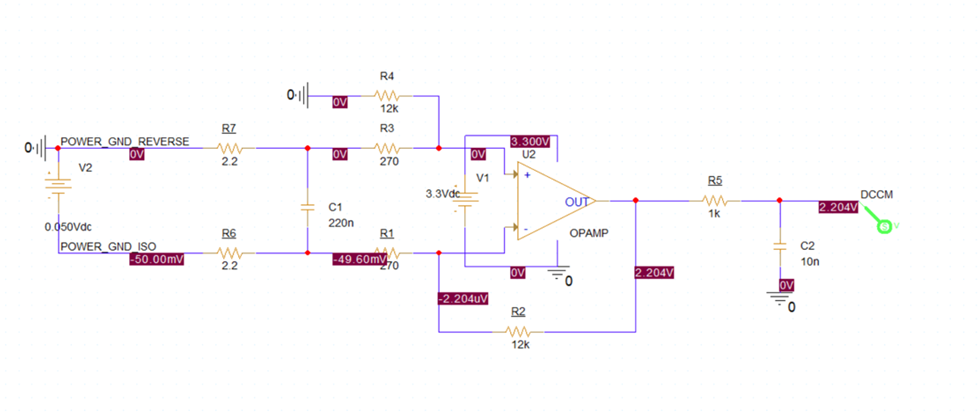
This circuit is designed to measure the small voltage difference across MOSFET terminals. By amplifying this differential signal to a level readable by the microcontroller, the design enables current estimation and feedback.
Why This Project Fits a PCB Sponsorship Model
Like other competition-driven university engineering teams, Navi USV depends on fast and reliable PCB manufacturing to turn validated designs into field-tested hardware. The ESC and PDB are not generic boards; they are mission-critical subsystems that directly affect propulsion reliability, electrical safety, and packaging quality inside the vehicle.
Support in PCB fabrication and assembly would help the team shorten iteration cycles, test improved revisions more quickly, and move from simulation-verified design to on-water validation with greater confidence. For a platform operating in a marine environment, this kind of iteration speed is especially valuable because electrical robustness must be proven not only on the bench but also during full-system trials.
In this sense, custom PCB support would contribute not just to a single board order, but to the broader engineering growth of the team. It would allow students to gain hands-on experience in power electronics, embedded control, CAN communication, protection design, and system integration while developing a more reliable autonomous vehicle for future competitions.
The Navi USVESC development effort represents a focused step toward a safer, cleaner, and more capable electrical architecture for the team’s autonomous surface vehicle. With custom propulsion control, centralized power distribution, and simulation-backed design decisions, the project aims to deliver a compact and reliable electronics solution suitable for demanding competition conditions.
Apply for sponsorship >>- Comments(0)
- Likes(0)