




MAXİMA-S UNDERWATER ROV MAİN CONTROL BOARD
Hello I am an electrical and electronics engineering student. I'm a sophomore and I love designing and producing things.
The aim of this project is to provide the main control of unmanned systems on land, sea and air platforms.
In this project, our unmanned underwater vehicle will use this control card designed for the competition.
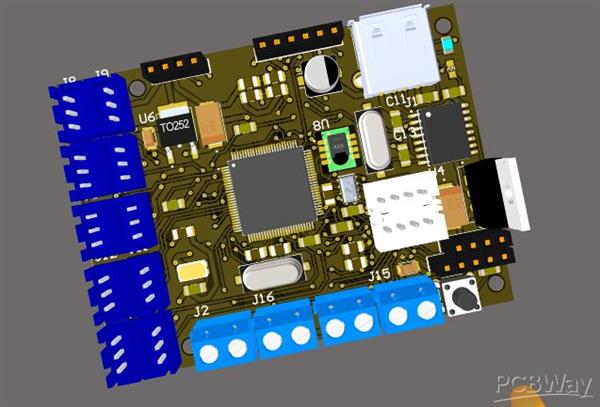
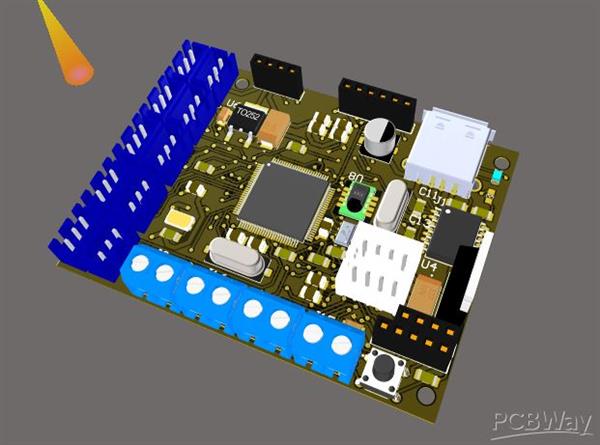
The ATMEGA2560 was chosen as the main control of the design for fast and practical operation.
The design includes a 12V battery input, 10 DC and SERVO motor input, reset button and a programmer USB. The voltage range of the design is 12V input 3.3V or 5V output.
Three sensors, one with gyroscope and the other with pressure and humidity, were used in the design. However, new sensors can always be added to the design. The sensors are designed to use SPI communication or I2C communication protocol.
The design also includes serial communication pins to communicate with the raspberry pi.
RS232 and RS485 connection pins are also available if we want to control the designed circuit with computer controlled interface.
In addition, the design is designed so that the raspberry pi is superimposed on top of the pi and secured by screws.
If PCBWAY supports this project for me, I would be happy to implement this project and let PCBWAY notify my friends and announce PCBWAY to people competing.

- Comments(0)
- Likes(1)













