AERVYN Swarm-Native Flight Controller
Introduction: The AERVYN Swarm-Native Flight Controller
The AERVYN project is an advanced, academic research endeavor aimed at solving one of the most significant challenges in modern robotics: autonomous drone swarm coordination. Developed by an Electronics and Communication Engineering (ECE) student at GTU-SET, India, AERVYN is a custom-designed, highly integrated flight controller built from the ground up to support native multi-agent mesh networking without relying on bulky, power-hungry companion computers.
The Problem with Off-the-Shelf Controllers
Standard commercial flight controllers (like standard Pixhawk variants) are excellent for single-drone operations. However, when attempting to coordinate a swarm of 5, 10, or 20 drones, these controllers bottleneck. They lack native, high-bandwidth out-of-band communication, often requiring researchers to strap heavy Raspberry Pis or NVIDIA Jetsons to the drone just to handle basic mesh networking. The AERVYN Prototype 3 board solves this by integrating high-speed networking directly onto the flight controller PCB alongside a dual-processor architecture.
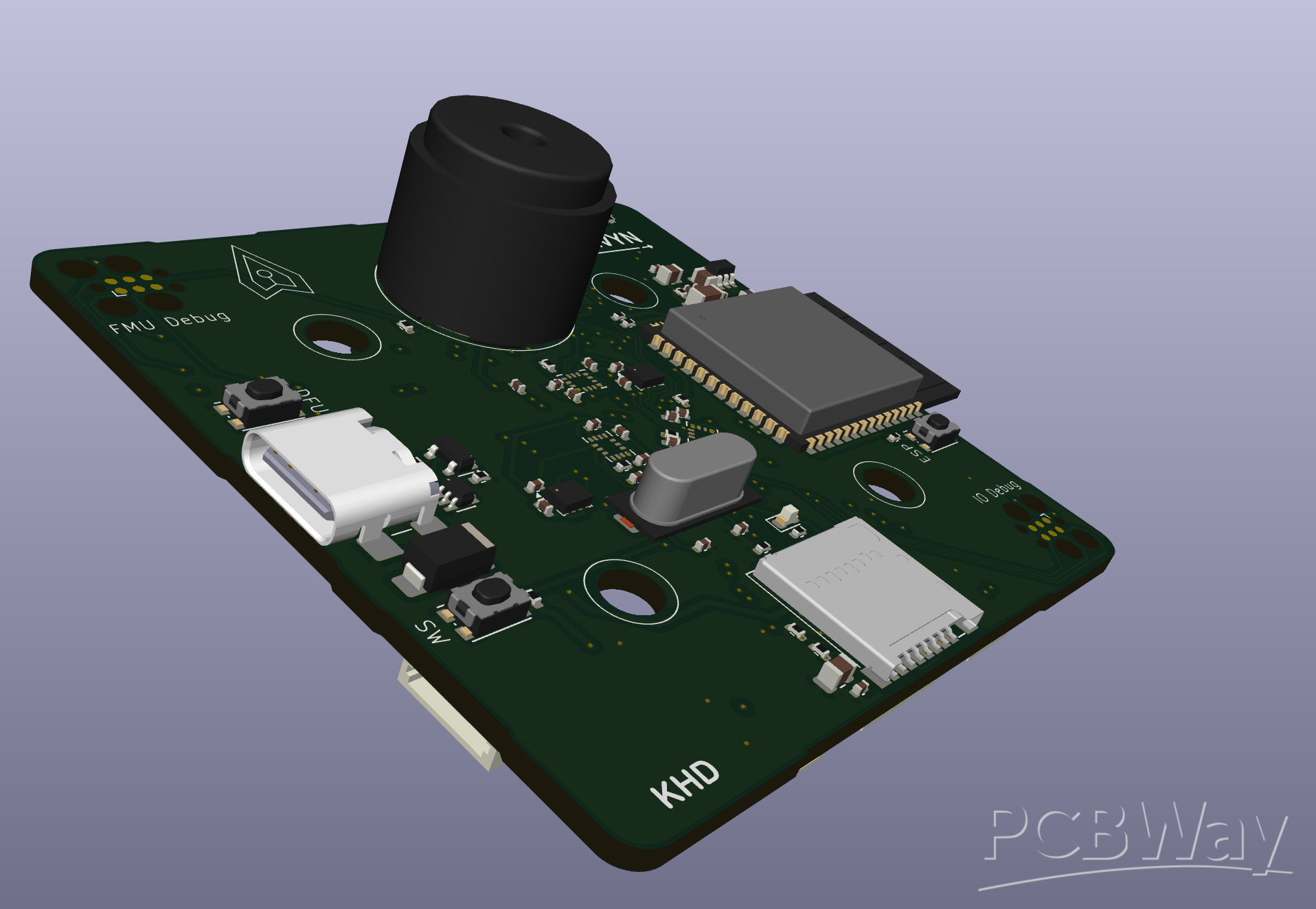
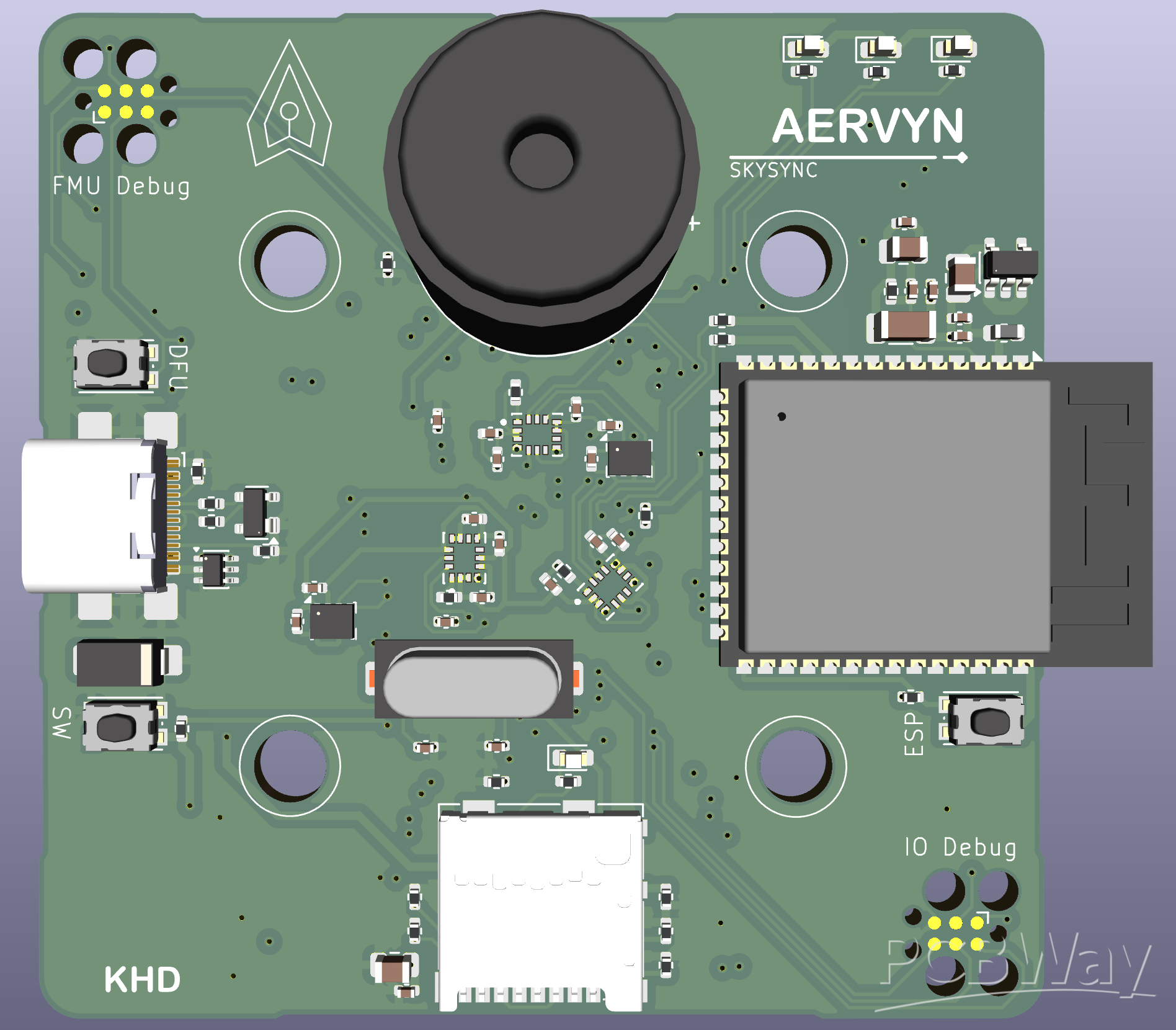
Deep Dive: Hardware Architecture & Components
To achieve this level of performance, the AERVYN flight controller features a highly complex, multi-layered hardware architecture:
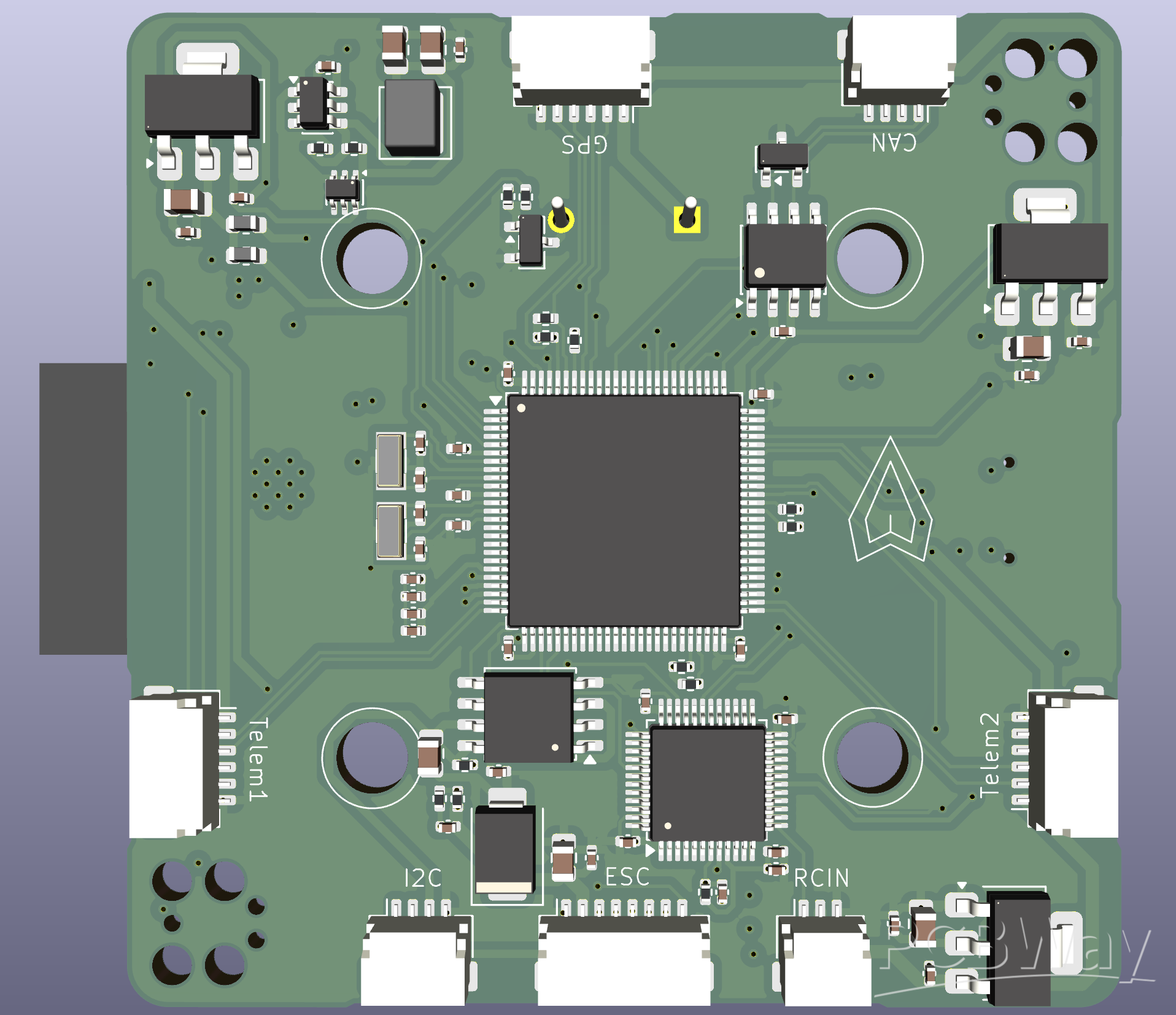
1. Primary Flight Management Unit (FMU): STM32H753 At the heart of the system is the STMicroelectronics STM32H753 (100-pin LQFP). This high-performance ARM Cortex-M7 MCU runs the core flight control algorithms. With its massive processing power, it allows for extremely fast PID loop iterations and complex sensor fusion algorithms required for aggressive swarm maneuvers.
2. IO Management Controller (IOMCU): STM32F103 To ensure safety and reliability, a secondary STM32F103 MCU is utilized as an IOMCU. This processor is dedicated entirely to real-time peripheral management, reading RC inputs, and driving the ESCs/servos. If the main FMU is overwhelmed, the IOMCU ensures the drone maintains basic failsafe control.
3. The Swarm Co-Processor: ESP32-S3 The defining feature of AERVYN is the fully integrated ESP32-S3 module. Instead of the main FMU handling network traffic, the ESP32-S3 acts as a dedicated networking co-processor. It handles WiFi and BLE mesh networking, communicating with other drones in the swarm and ground control, and feeds simple, parsed telemetry/commands to the main FMU.
4. High-Precision Sensor Suite Drones operating in close proximity require absolute spatial awareness. The board is equipped with triple ICM-42670-P IMUs. This triple-redundant setup allows for advanced voting algorithms to filter out vibrations and ensure that a single sensor failure does not result in a crash.
5. Robust Peripheral Interfaces To survive the electrically noisy environment of a multi-rotor drone, AERVYN utilizes high-speed CAN transceivers for external sensor networking, alongside heavy LC power filtering on all sensor and logic voltage rails.
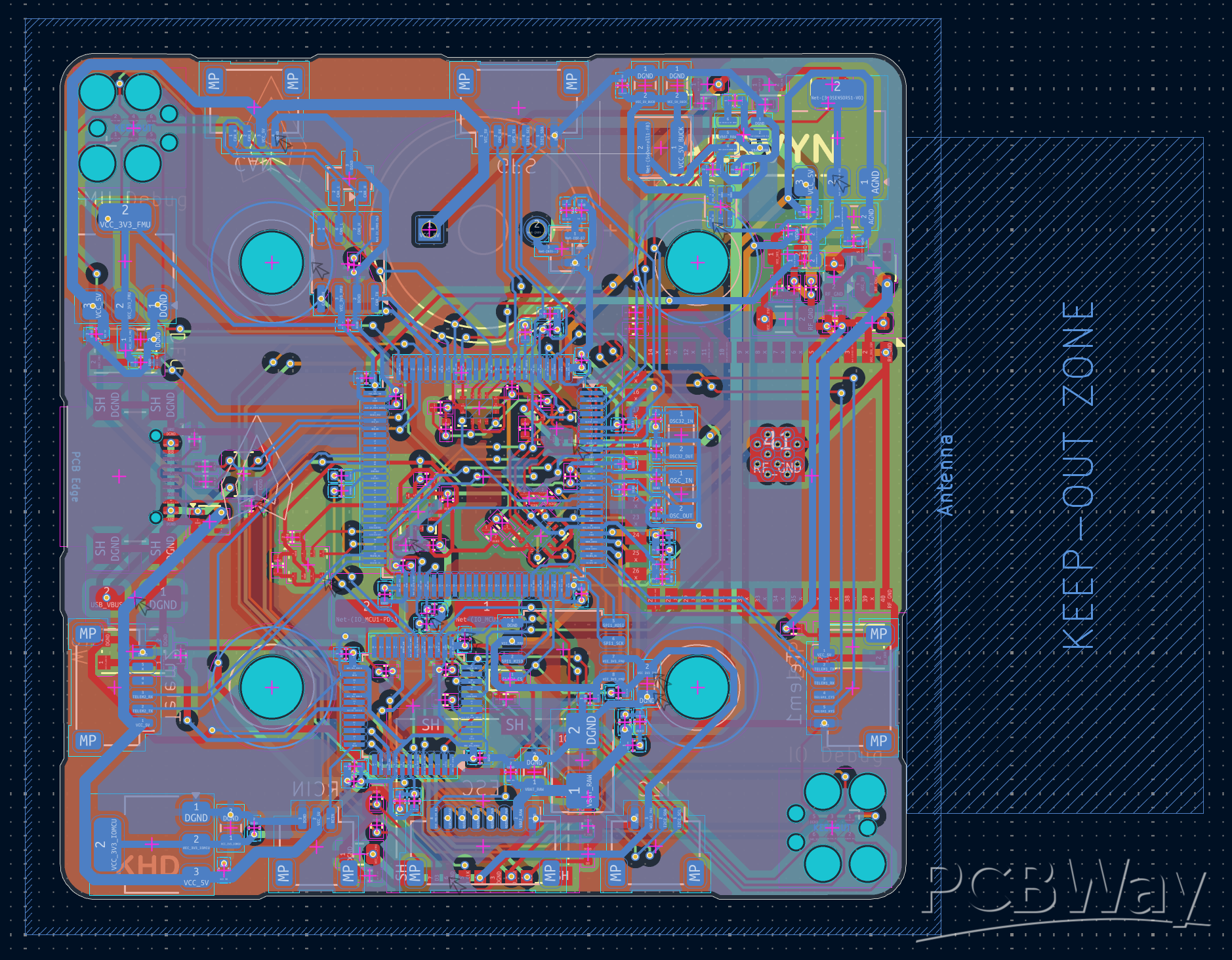
The Manufacturing Challenge
Designing this board was a significant challenge. It requires routing high-density components (like the STM32H753), strict impedance control for the USB and networking lines, and multiple signal layers to ensure proper power delivery and ground planes. As an ECE student focusing primarily on firmware, transitioning this complex schematic into a fully routed PCB has been a massive learning curve.
Because of the precise tolerances required for this board to function reliably in the air, high-quality manufacturing and PCBA assembly are absolutely critical. We are hoping to partner with PCBWay to bring this complex academic prototype to life!
- Comments(0)
- Likes(1)