




Vishwa VJTI Mars Rover IRC 2023
About our club:
VISHWA is a club aiming to spread astronomy among the students of VJTI and win national and international competitions in the field of astronomy like the International Rover Challenge (IRC), CanSat, etc representing VJTI and our sponsors in front of a massive audience.
Our vision is to provide technical opportunities to VJTI students in the field of Astronomy & Space to aid VJTI to be at par with parallel premier institutions.
About International Rover Challenge (IRC):
IRC is a space robotics engineering competition by the Space Robotics Society. It challenges university students to conceptualize, design, develop and operate an astronaut-assistive next-gen Mars Rover and perform specific missions in Mars simulated conditions.
For 2023 we are participating in our first International Rover Challenge and as of now, we have VJTI’s first-ever Rover department working on building a Mars Rover.
First Stage - IRDC:
The Space Robotics Society’s International Rover Design Challenge (IRDC)- 2022 is an online space engineering design competition. It challenges university students to conceptualize and design Next-Gen Mars Rovers, which shall be fully equipped and mission ready for future exploration operations on Mars.
Our work:
- SCR report:
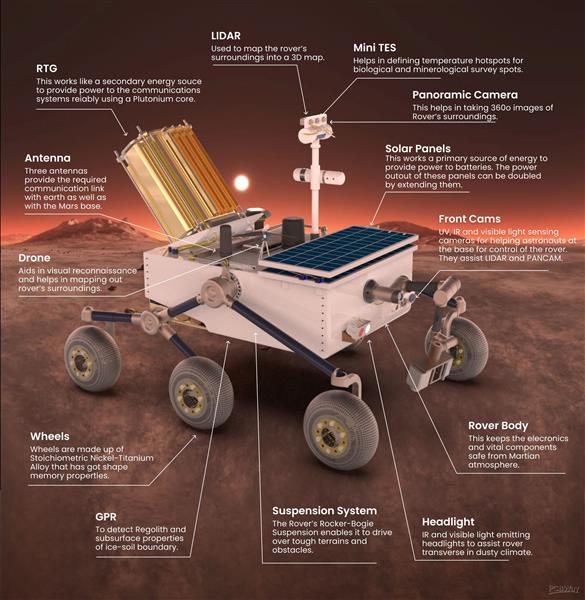
This System Concept Review (SCR) Report covers the conceptualization and indigenous design of a Mars Rover, thoroughly equipped to explore and investigate the soil-ice boundary region, Planum Australe.
We have made detailed documentation of all subsystems, which includes the requirements, rover design, suspension system, science instruments, onboard electronics, communication and use of special batteries.
The Mission approach was determined using a simple flowchart first and a report was made based on each mission.
(The Mars Rover with the Reconnaissance Drone)

SCR Video:
Below we have the link to our SCR Video submission for the IRDC Competition-
https://www.instagram.com/reel/CkA9ictAuxN/?utm_source=ig_web_copy_link
Second Stage – IRC:
Submission of an SDDR video and report is mandatory for qualifying the finals of the International Rover Challenge (IRC). The System Design and Development Review (SDDR) report covers the conceptualization and design of a Mars Rover, thoroughly equipped to undertake an Instrument Deployment and Maintenance Operation, Reconnaissance and Delivery Operation, Autonomous Mission, and an Astrobiology Expedition. The video link including the explanation and demonstration of the engineering methodologies implemented is embedded above.
PCBs we have designed:
Many electronics of our Rover have been made custom, to reduce the overall project's size and weight. We studied the design of basic circuit boards and added our elements to them, keeping in mind the dimension requirements of electronics in the Rover. The software used for PCBs is KiCAD.
Rover Control:
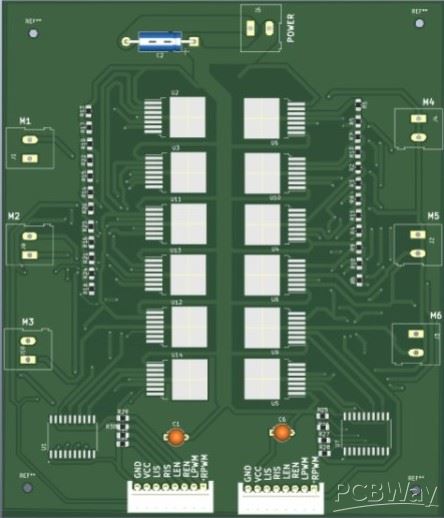
Our Electronics Team has designed a custom PCB for controlling our planetary gear motors. The motor driver is classified under BLDC drivers.
It can deliver up to 30A current per channel.
Power Distribution:
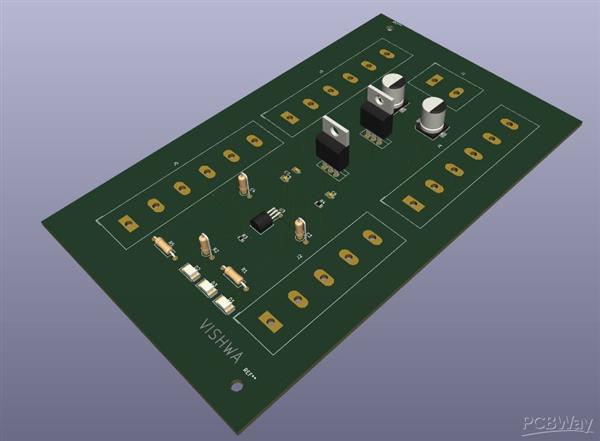
Another PCB that we designed was the power distribution board. The PD Board inputs a given voltage from our LiFePo4 batteries and produces the voltages 12, 9, 5 and 3.3V at its output terminals.
This board powers up all the microcontrollers and microcomputers on board, and also powers the sensors with 3.3V. Thus, it acts as a buck converter.
Science Task:
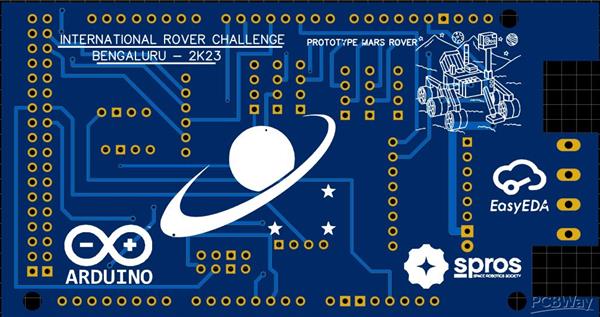
The third PCB we developed was for the science task of the rover. In the Science Task, the prototype rover must collect soil from a particular site. To reduce the complex wiring inside the science container, a custom Arduino Mega Shield PCB has been designed for all the required sensors.
This shield is the main processor for all real-time communications between sensors and the base station GUI.
This is not just it; our club is working on more PCB designs in upcoming projects like the International CanSat competition organized by the Astronomy Aeronautical Society.
One of the most important reasons we want to compete in IRC is that we are confident in having a chance to win. Our team consists of members of numerous collegiate societies who have won major worldwide honours in their respective fields, including AIAA(D/B/F)(USA), SAE BAJA, software hackathons, and many others. Our members have interned with Godrej, BARC, and other companies. This inspires us to combine their expertise in their various fields and make an influence on space exploration via our rover design.
We feel that creating a rover is a one-of-a-kind experience since it is one of the few challenges in college where the finest from every branch join together to develop something fascinating. Furthermore, because robots are the signature product of engineering, each member of our team has aspired to develop one. Aside from viewing it as a competition, we see IRC as an opportunity to put theory into practice, while also taking into account the entire engineering system (as opposed to hackathons and programming challenges, where one addresses an issue from a single perspective). IRC has given us a taste of long hours of hard work and how delighted it feels to see that come into reality. All of our team members will cherish this moment throughout our life.
We know that PCBWay is the world’s fastest PCB manufacturer, and your services never tend to disappoint consumers. Support from PCBWay would be of great help to our team. We have tried many other ways to manufacture PCBs locally in India, but we have inadequate manufacturing of parts. Having a PCB printed by PCBWay will allow our team to experience practical design so that they can work together to create more, not just for our Rover, but also for URC, CanSat, and further CanSat and Rocketry projects as well.
For more information about VISHWA, you can view our Instagram page @vishwavjti and our LinkedIn handle @Vishwa, VJTI.
Apply for sponsorship >>- Comments(0)
- Likes(0)












